
Research on System Identification of Shaking Table Based on Elastic Net Regression Algorithm
-
摘要: 地震模拟振动台的系统辨识精度不足将会导致振动台控制性能下降,试验精度降低。本文以北京工业大学3.0 m×3.0 m的振动台为研究对象,在构建振动台位移闭环控制系统模型的基础上,提出了基于弹性网络回归的系统辨识方法,该方法通过融合L1和L2范数正则化项,具有良好的抗噪性与稀疏性。研究结果显示:在15 %噪声工况下,采用基于弹性网络回归算法辨识得到的系统模型与理论系统模型相关系数达93.62%,对比研究显示该相关系数指标优于传统的最小二乘、岭回归、LASSO回归的指标。结果表明,弹性网络算法能有效抑制噪声干扰,精准辨识复杂系统的动态特性,可为振动台高精度控制提供重要依据。Abstract: Insufficient system identification accuracy of the earthquake simulation shaking table will lead to a decline in the control performance of the shaking table and a reduction in the test accuracy. This paper takes the 3.0 m × 3.0 m shaking table of Beijing University of Technology as the research object. Based on the construction of the displacement closed-loop control system model of the shaking table, a system identification method based on elastic net regression is proposed. This method has good noise resistance and sparsity by integrating the L1 and L2 norm regularization terms. The research results show that under the working condition of 15% noise, the correlation coefficient between the system model identified by the elastic net regression method and the theoretical system model reaches 93.62%. The comparative study shows that this correlation coefficient index is better than those of the traditional least squares, ridge regression, and LASSO regression methods. The results indicate that the elastic net algorithm can effectively suppress noise interference and accurately identify the dynamic characteristics of complex systems, providing an important basis for the high-precision control of the shaking table.
-
Key words:
- Shaking table /
- System identification /
- Elastic net regression
-
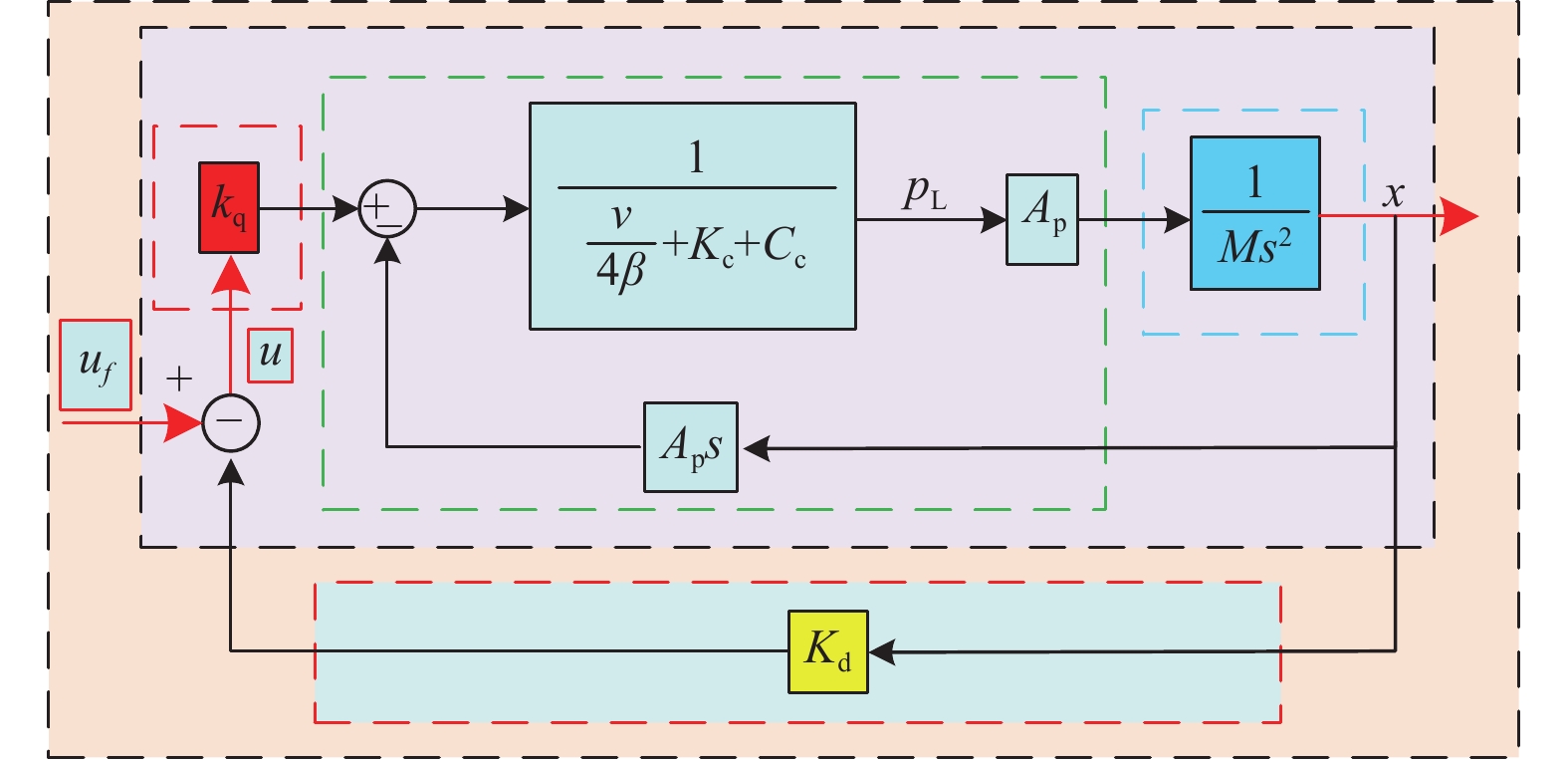
图 2 振动台位移闭环控制系统模型
Figure 2. Model of the displacement closed-loop control system for the shaking table
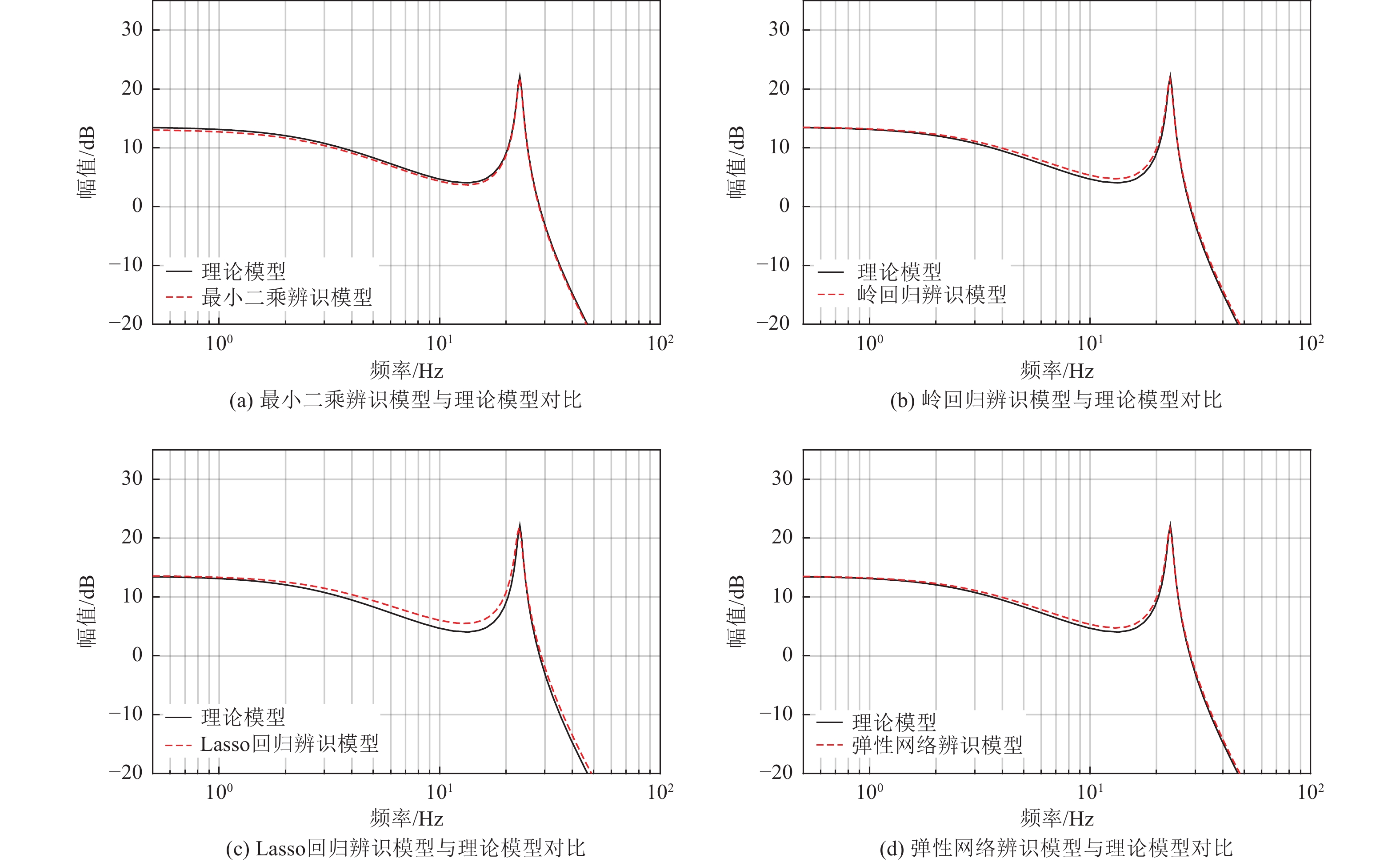
图 3 无噪声工况辨识模型与理论模型频率响应对比图
Figure 3. Comparison of frequency responses between the identified model and the theoretical model under no-noise conditions
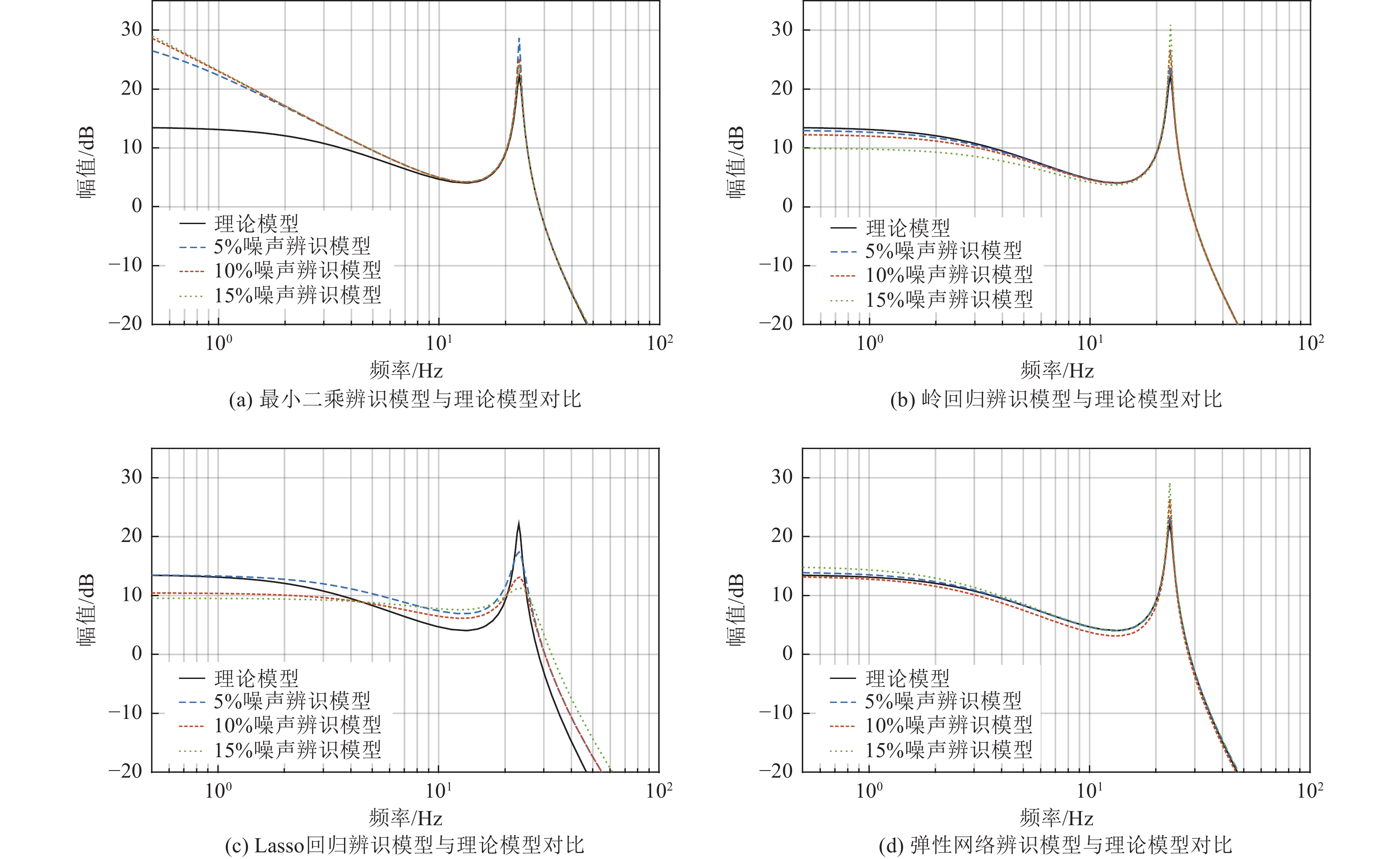
图 4 含噪声工况辨识模型与理论模型频率响应对比图
Figure 4. Comparison of frequency responses between the noise-added identified model and the theoretical model
表 1 振动台基本性能指标
Table 1. Basic parameters of the shaking table
参数 性能指标 参数 性能指标 台面尺寸 3.0 m × 3.0 m 最大位移 ± 100 mm 台面质量 6 000 kg 最大速度 0.6 m/s 控制方式 电液伺服控制 最大加速度 空载2.0 g;满载0.9 g 工作频段 0.4~50 Hz 最大负载 10 000 kg  下载: 导出CSV
下载: 导出CSV
表 2 振动台控制参数
Table 2. Control parameters of the shaking table
参数 性能指标 活塞有效截面面积$ {A}_{\text{P}} $ 1.1×10−2 m2 伺服阀流量增益$ {k}_{\text{q}} $ 1.364×10−2 m3·s−1·V−1 阻尼比$ {D}_{\text{q}} $ 0.7 油柱共振频率$ {n}_{0} $ 628 rad/s 位移反馈增益$ {K}_{\text{d}} $ 100 V/m
下载: 导出CSV
表 3 辨识模型与理论模型误差表
Table 3. Error table of the identified model and the theoretical model
辨识算法 频率响应均方误差 频率响应相关性系数 最小二乘回归算法 0.032 99.99% 岭回归算法 0.005 99.93% LASSO回归算法 0.111 99.37% 弹性网络回归算法 0.018 99.83%
下载: 导出CSV
表 4 增加噪声辨识模型与理论模型频率响应相关性系数
Table 4. Correlation coefficient of frequency responses between the noise-added identified model and the theoretical model
辨识算法 相关性系数 5%噪声 10%噪声 15%噪声 最小二乘回归算法 76.25% 62.74% 58.69% 岭回归算法 94.80% 91.05% 74.43% LASSO回归算法 96.91% 92.34% 87.43% 弹性网络回归算法 99.88% 97.83% 93.62%
下载: 导出CSV
表 5 增加噪声辨识模型与理论模型频率响应均方误差
Table 5. Mean Square Error of frequency responses between the noise-added identified model and the theoretical model
辨识算法 相关性系数 5%噪声 10%噪声 15%噪声 最小二乘回归算法 139.836 520.050 835.784 岭回归算法 0.470 0.861 3.768 LASSO回归算法 0.402 1.405 1.739 弹性网络回归算法 0.099 0.256 0.727
下载: 导出CSV
-
陈铭豪, 2022. 基于高斯过程回归的非参数化辨识及模型预测控制方法研究. 杭州: 浙江大学.Chen M. H., 2022. Nonparametric identification and model predictive control based on Gaussian process regression. Hangzhou: Zhejiang University. (in Chinese) 郭治博, 2023. 基于激光追踪仪多站位技术的工业机器人定位误差补偿. 北京: 北京工业大学.Guo Z. B., 2023. Industrial robot positioning error compensation based on laser tracer multi-station technology. Beijing: Beijing University of Technology. (in Chinese) 洪峰, 2002. 地震模拟振动台系统频率特性分析方法的研究. 世界地震工程, 18(3): 1−5.Hong F., 2002. Study on methods for analyzing frequency characteristics of shaking table systems. World Earthquake Engineering, 18(3): 1−5. (in Chinese) 黄浩华, 2008. 地震模拟振动台的设计与应用技术. 北京: 地震出版社. 李琦, 邵诚, 2009. 基于核岭回归的非线性系统辨识及其应用. 系统仿真学报, 21(8): 2152−2155, 2194.Li Q., Shao C., 2009. Nonlinear systems identification based on kernel ridge regression and its application. Journal of System Simulation, 21(8): 2152−2155,2194. (in Chinese) 王巨科, 2020. 振动台/振动台阵与试验结构系统的时域波形复现控制策略研究. 北京: 北京工业大学.Wang J. K., 2020. Research on time wave replication control strategy of the systems of shaking table/multiple shaking tables array and test structure. Beijing: Beijing University of Technology. (in Chinese) 邢彤, 左强, 杨永帅等, 2012. 液压激振技术的研究进展. 中国机械工程, 23(3): 362−367, 377.Xing T., Zuo Q., Yang Y. S., et al., 2012. Progresses of research on hydraulic vibration technology. China Mechanical Engineering, 23(3): 362−367,377. (in Chinese) 占鹏云, 纪金豹, 孙丽娟等, 2014. 振动台系统的最小二乘辨识方法研究. 工业建筑, 44(S1): 285−288, 301. doi: 10.13204/j.gyjz2014.s1.098Zhan P. Y., Ji J. B., Sun L. J., et al., 2014. Research on least squares identification method of shaking table systems. Industrial Construction, 44(S1): 285−288,301. (in Chinese) doi: 10.13204/j.gyjz2014.s1.098 Barigozzi M., Hallin M., 2016. Generalized dynamic factor models and volatilities: recovering the market volatility shocks. The Econometrics Journal, 19(1): C33−C60. doi: 10.1111/ectj.12047 Caravani P., Watson M. L., Thomson W. T., 1977. Recursive least-squares time domain identification of structural parameters. Journal of Applied Mechanics, 44(1): 135−140. doi: 10.1115/1.3423979 Hoerl A. E., Kennard R. W., 1970. Ridge regression: biased estimation for nonorthogonal problems. Technometrics, 12(1): 55−67. doi: 10.1080/00401706.1970.10488634 Kouris L. A. S., Penna A., Magenes G., 2022. Assessment of a full-scale unreinforced stone masonry building tested on a shaking table by inverse engineering. Buildings, 12(8): 1235. doi: 10.3390/buildings12081235 Plummer A. R., 2016. Model-based motion control for multi-axis servohydraulic shaking tables. Control Engineering Practice, 53: 109−122. doi: 10.1016/j.conengprac.2016.05.004 Tibshirani R., 1996. Regression shrinkage and selection via the lasso. Journal of the Royal Statistical Society Series B: Statistical Methodology, 58(1): 267−288. doi: 10.1111/j.2517-6161.1996.tb02080.x Tibshirani R., 1997. The lasso method for variable selection in the Cox model. Statistics in Medicine, 16(4): 385−395. doi: 10.1002/(SICI)1097-0258(19970228)16:4<385::AID-SIM380>3.0.CO;2-3 Yao H. C., Tan P., Yang T. Y., et al., 2023. Shake table real-time hybrid testing for shear buildings based on sliding mode acceleration control method. Structures, 52: 230−240. doi: 10.1016/j.istruc.2023.03.140 Zadeh L. A., 1962. From circuit theory to system theory. Proceedings of the IRE, 50(5): 856−865. doi: 10.1109/JRPROC.1962.288302 Zou H., Hastie T., 2005. Regularization and variable selection via the elastic net. Journal of the Royal Statistical Society Series B: Statistical Methodology, 67(2): 301−320. doi: 10.1111/j.1467-9868.2005.00503.x -

 点击查看大图
点击查看大图

计量
- 文章访问数: 66
- HTML全文浏览量: 19
- PDF下载量: 58
- 被引次数: 0
