
BM3D Method Combined with Non-subsampled Shearlet Transform for Removing Image Noise
-
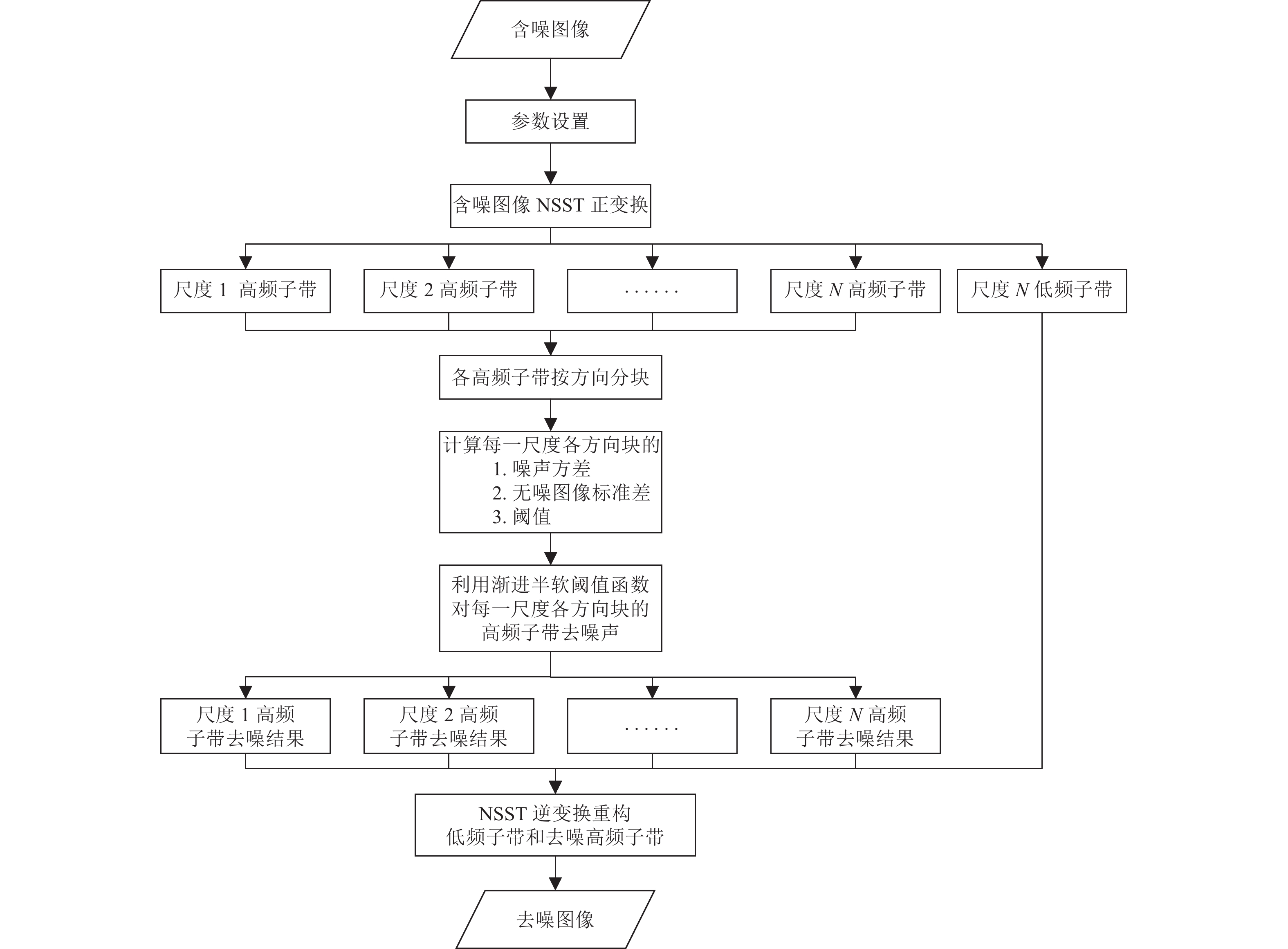
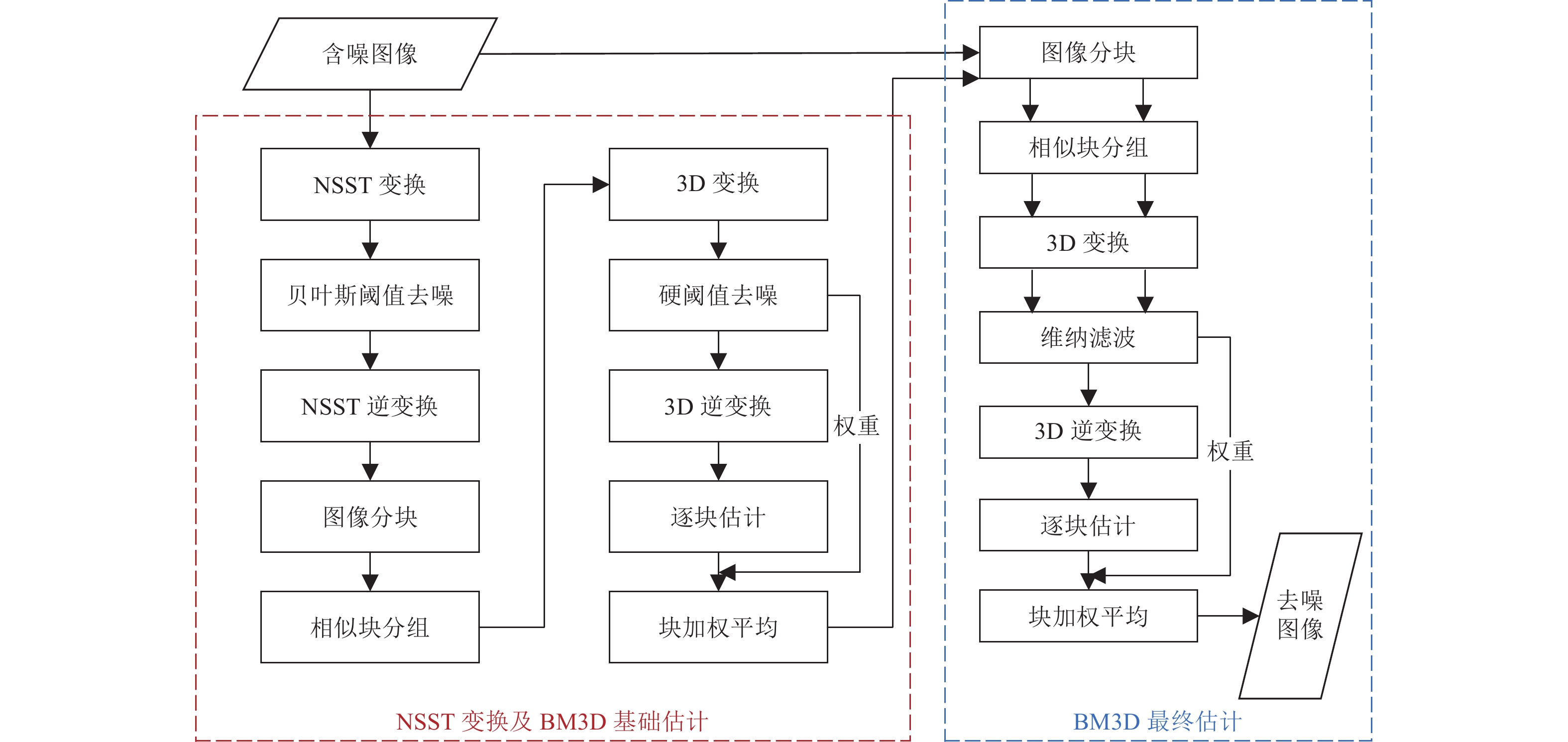
摘要: 强噪声图像去噪一直是图像处理技术应用领域研究的热点,为进一步提高强噪声图像的去噪质量和对图像边缘的保护,针对三维块匹配(Block Matching 3D,BM3D)方法对强噪声图像去噪效果不佳及图像线状奇异性(如边缘)缺乏最优表示的问题,提出了基于二维非下采样剪切波变换(Non-subsampled Shearlet Transform,NSST)和BM3D的组合去噪方法。该方法首先对含噪图像进行NSST正变换,得到不同尺度和不同方向高频子带的剪切波系数;然后对每个尺度不同方向的高频子带求取贝叶斯阈值,并利用渐进半软阈值函数对各高频子带进行去噪;最后对低频子带和各去噪高频子带进行NSST逆变换,得到去噪结果。将去噪图像作为BM3D中基础估计阶段的预滤波,能够进一步提高基础估计阶段分组的正确性,为BM3D去噪奠定良好基础。组合去噪方法结合了NSST与BM3D的各自优势,仿真试验结果表明,对于低噪声图像,本方法和BM3D方法去噪效果相同,略优于非局部平均法;对于强噪声卫星影像,本方法去噪效果优于BM3D和非局部平均法。Abstract: Image denoising with strong noise (noise standard deviation σ≥40) is always a hot topic in the application field of image processing technology. In order to further improve the denoising quality and edge protection of images with strong noise, a combined denoising method based on 2D non-subsampled shearlet transform and BM3D was proposed to solve the problems of poor denoising effect of block-matching 3D (BM3D) on strong noise images and the lack of optimal representation of linear singularity (such as edge). Shearlet transform provides a local, multi-scale and multi-direction analysis method that can optimally represent the linear singularity of image. BM3D method has the best effect on image noise reduction (σ<40) among traditional noise reduction methods. The denoising steps of the combined method are as follows: Firstly, NSST forward transform is performed on the image with noise, and the shear wave coefficients of high-frequency subbands with different scales and directions are obtained. Then the Bayesian threshold values of the high-frequency subbands in different directions of each scale are obtained and the asymptotic semi-soft threshold function is used to denoise the high-frequency subbands. Finally, NSST inverse transform is performed on the low frequency subband and all the denoised high frequency subbands to obtain the denoising results. The denoised image is used as the pre-filter in the basic estimation stage of BM3D, which can further improve the correctness of the grouping in the basic estimation stage and lay a good foundation for the denoising of BM3D. The method of this paper combined the advantages of NSST and BM3D. Simulation results show that for low noise images, the method has the same denoising effect as BM3D, slightly better than that of NLmeans method. The method is superior to BM3D and NLmeans method for the denoising effect of satellite images with strong noise.
-
Key words:
- NSST /
- BM3D /
- Bayesian threshold /
- Linear singularity /
- Asymptotically semi-soft threshold function
-
表 1 去噪方法性能评价结果
Table 1. Performance evaluation table of denoising method
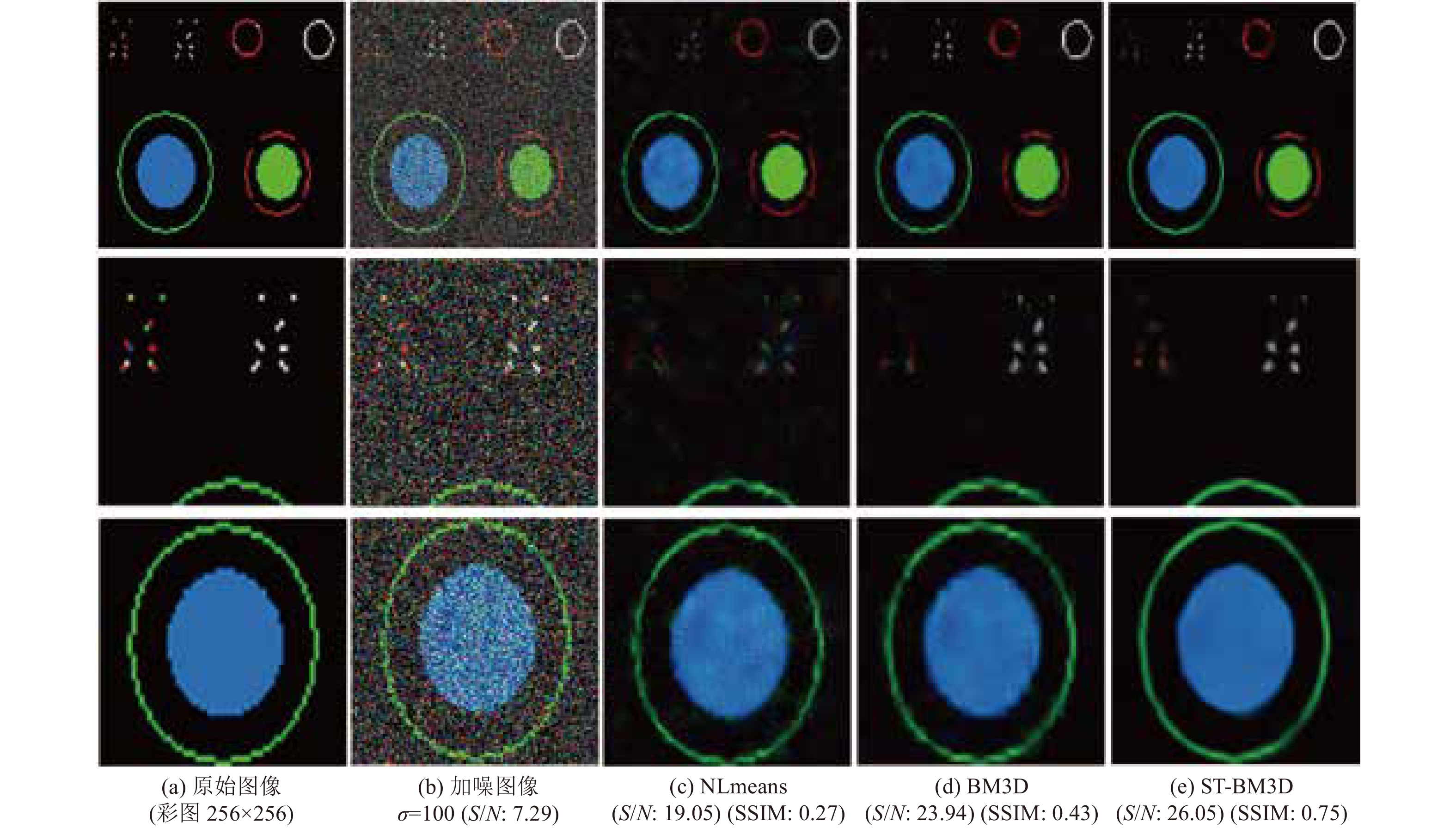
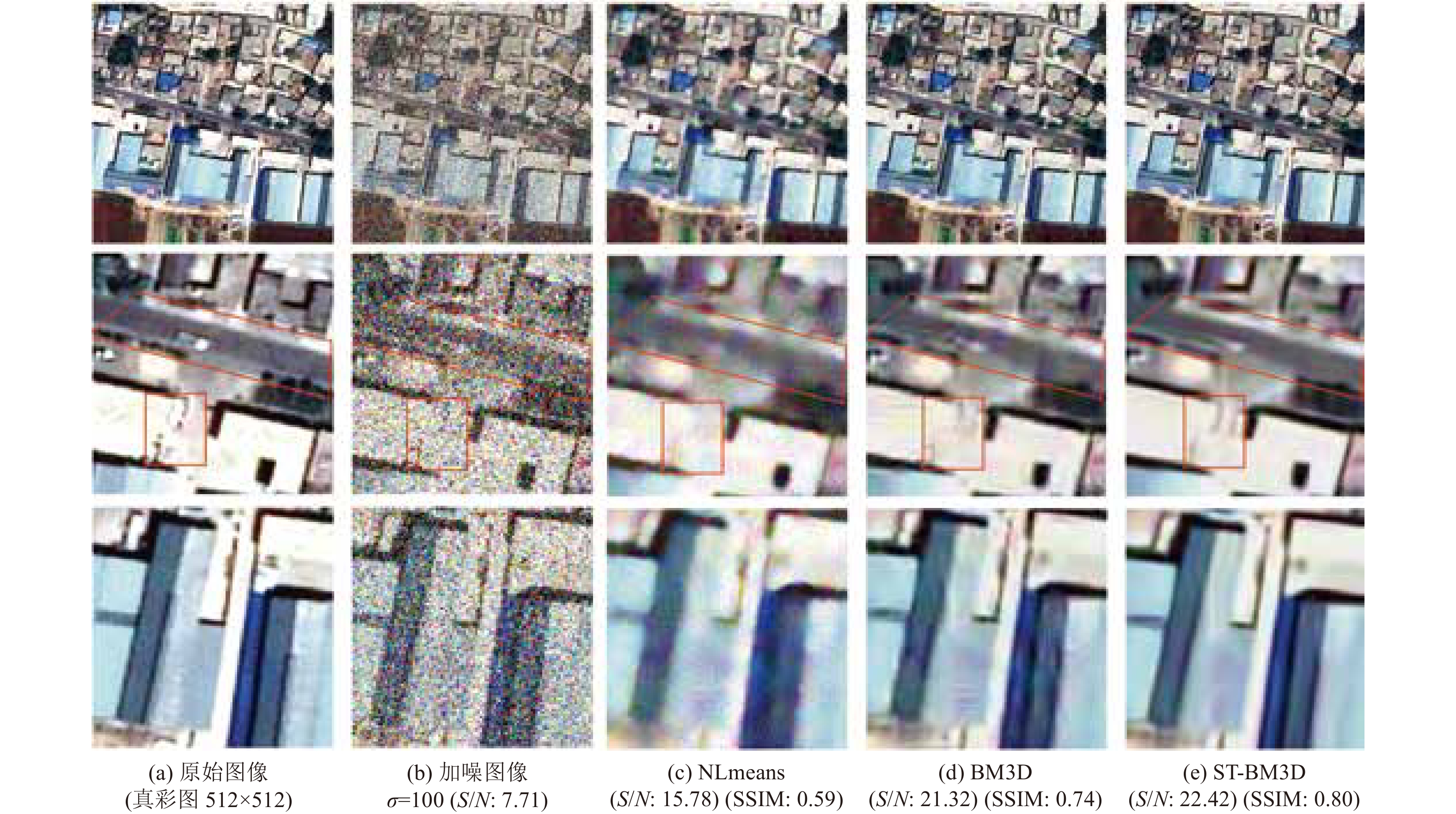
图像名称 Lena图像 点线面高对比度图像 无人机图像 卫星影像 噪声值 (低高斯噪声标准差30 dB) (强高斯噪声标准差100 dB) (强高斯噪声标准差100 dB) (强高斯噪声标准差100 dB) 评价参数 PSNR SSIM PSNR SSIM PSNR SSIM PSNR SSIM NL means方法 25.31 0.97 19.05 0.27 16.33 0.42 15.78 0.59 BM3D方法 28.56 0.98 23.94 0.43 22.07 0.60 21.32 0.74 本方法 28.61 0.98 26.05 0.75 23.03 0.71 22.42 0.80  下载: 导出CSV
下载: 导出CSV
-
阿依古力·吾布力, 2015. 基于剪切波和NSST变换的图像增强算法研究. 乌鲁木齐: 新疆大学.Wubuli A., 2015. Research on image enhancement methods based on shearlet and NSST transform. Urumqi: Xinjiang University. (in Chinese) 车守全, 李涛, 包从望等, 2022. 矿区遥感图像去噪方法研究. 工矿自动化, 48(1): 113—118, 124Che S. Q. , Li T. , Bao C. W. , et al. , 2022. Research on denoising method of remote sensing image in mining area. Journal of Mine Automation, 48(1): 113—118, 124. (in Chinese) 邓开元, 任超, 梁月吉等, 2019. 一种遥感影像混合噪声的去噪方法. 测绘通报, (2): 28—31, 70Deng K. Y. , Ren C. , Liang Y. J. , et al. , 2019. A denoising method of mixed noise of remote sensing image. Bulletin of Surveying and Mapping, (2): 28—31, 70. (in Chinese) 冯岩, 薛瑞, 2014. 剪切波理论及其应用研究进展. 信阳师范学院学报: 自然科学版, 27(3): 463—468Feng Y. , Xue R. , 2014. Advances in theory and application of shearlets. Journal of Xinyang Normal University: Natural Science Edition, 27(3): 463—468. (in Chinese) 龚俊亮, 何昕, 魏仲慧等, 2013. 基于贝叶斯估计的剪切波域局部自适应图像去噪. 液晶与显示, 28(5): 799—804 doi: 10.3788/YJYXS20132805.0799Gong J. L. , He X. , Wei Z. H. , et al. , 2013. Local adaptive image denoising based on Bayesian estimation in shearlet domain. Chinese Journal of Liquid Crystals and Displays, 28(5): 799—804. (in Chinese) doi: 10.3788/YJYXS20132805.0799 韩文方, 2013. 基于稀疏表示的剪切波域图像去噪算法研究. 广州: 华南理工大学.Han W. F., 2013. Research on shearlet domain image denoising algorithm via sparse representation. Guangzhou: South China University of Technology. (in Chinese) 焦姣, 吴玲达, 2019. 形态学滤波和改进PCNN的NSST域多光谱与全色图像融合. 中国图象图形学报, 24(3): 435—446Jiao J. , Wu L. D. , 2019. Fusion of multispectral and panchromatic images via morphological filter and improved PCNN in NSST domain. Journal of Image and Graphics, 24(3): 435—446. (in Chinese) 李彦, 汪胜前, 邓承志, 2011. 多尺度几何分析的图像去噪方法综述. 计算机工程与应用, 47(34): 168—173, 218Li Y. , Wang S. Q. , Deng C. Z. , 2011. Overview on image denoising based on multi-scale geometric analysis. Computer Engineering and Applications, 47(34): 168—173, 218. (in Chinese) 刘迪, 贾金露, 赵玉卿等, 2021. 基于深度学习的图像去噪方法研究综述. 计算机工程与应用, 57(7): 1—13Liu D. , Jia J. L. , Zhao Y. Q. , et al. , 2021. Overview of image denoising methods based on deep learning. Computer Engineering and Applications, 57(7): 1—13. (in Chinese) 马科, 2014. 红外图像的多尺度几何分析理论及应用研究. 成都: 电子科技大学.Ma K., 2014. Multiscale geometric analysis theory and application research of infrared image. Chengdu: University of Electronic Science and Technology of China. (in Chinese) 唐飞, 2014. 基于Contourlet变换和Shearlet变换的图像去噪算法研究. 湘潭: 湘潭大学.Tang F., 2014. Research on image denoising methods based on contourlet transform and shearlet transform. Xiangtan: Xiangtan University. (in Chinese) 吴安全, 沈长圣, 肖金标等, 2017. 基于一种渐进半软阈值函数的小波去噪. 电子器件, 40(2): 396—399Wu A. Q. , Shen C. S. , Xiao J. B, et al. , 2017. Wavelet denoising based on an asymptotic semisoft thresholding function. Chinese Journal of Electron Devices, 40(2): 396—399. (in Chinese) 张杰, 史小平, 张焕龙等, 2019. 高噪声遥感图像稀疏去噪重建. 哈尔滨工业大学学报, 51(10): 47—54Zhang J. , Shi X. P. , Zhang H. L. , et al. , 2019. High noise remote sensing image sparse denoising reconstruction. Journal of Harbin Institute of Technology, 51(10): 47—54. (in Chinese) 张胜男, 王雷, 常春红等, 2020. 基于三维剪切波变换和BM4 D的图像去噪方法. 山东大学学报(工学版), 50(2): 83—90Zhang S. N. , Wang L. , Chang C. H. , et al. , 2020. Image denoising based on 3 D shearlet transform and BM4 D. Journal of Shandong University (Engineering Science), 50(2): 83—90. (in Chinese) 赵洪臣, 周兴华, 彭聪等, 2019. 一种去除遥感影像混合噪声的集成BM3 D方法. 武汉大学学报·信息科学版, 44(6): 925—932Zhao H. C. , Zhou X. H. , Peng C. , et al. , 2019. An integrated BM3 D method for removing mixed noise in remote sensing image. Geomatics and Information Science of Wuhan University, 44(6): 925—932. (in Chinese) Buades A., Coll B., Morel J. M., 2005. A non-local algorithm for image denoising. In: IEEE International Conference on Computer Vision and Pattern Recognition. San Diego: IEEE, 60—65. Dabov K. , Foi A. , Katkovnik V. , et al. , 2007. Image denoising by sparse 3-D transform-domain collaborative filtering. IEEE Transactions on Image Processing, 16(8): 2080—2095. doi: 10.1109/TIP.2007.901238 Donoho D. L. , Johnstone I. M. , 1994. Ideal spatial adaptation by wavelet shrinkage. Biometrika, 81(3): 425—455. doi: 10.1093/biomet/81.3.425 Donoho D. L. , 1995. De-noising by soft-thresholding. IEEE Transactions on Information Theory, 41(3): 613—627. doi: 10.1109/18.382009 Easley G. , Labate D. , Lim W. Q. , 2008. Sparse directional image representations using the discrete shearlet transform. Applied and Computational Harmonic Analysis, 25(1): 25—46. doi: 10.1016/j.acha.2007.09.003 Guo K. H., Labate D., Lim W. Q., et al., 2004, Wavelets with composite dilations. Electronic Research Announcements of the American Mathematical Society, 10: 78—87. Guo K. H., Kutyniok G., Labate D., 2005. Sparse multidimensional representations using anisotropic dilation and shear operators. Brentwood: Nashboro Press, 1—13. Guo K. H. , Labate D. , 2007. Optimally sparse multidimensional representation using shearlets. SIAM Journal on Mathematical Analysis, 39(1): 298—318. doi: 10.1137/060649781 Kutyniok G., Labate D., 2012. Shearlets: multiscale analysis for multivariate data. Boston: Springer. Labate D., Lim W. Q., Kutyniok G., et al., 2005. Sparse multidimensional representation using shearlets. In: Proceedings of SPIE 5914, Wavelets XI. San Diego: SPIE, 59140 U. Wang Z. , Bovik A. C. , Sheikh H. R. , et al. , 2004. Image quality assessment: from error visibility to structural similarity. IEEE Transactions on Image Processing, 13(4): 600—612. doi: 10.1109/TIP.2003.819861 -




 点击查看大图
点击查看大图

图(8) / 表(1)
计量
- 文章访问数: 170
- HTML全文浏览量: 60
- PDF下载量: 10
- 被引次数: 0
