
Seismic Activity Analysis of ML4.7 in Kaiping, Tangshan in 2016
-
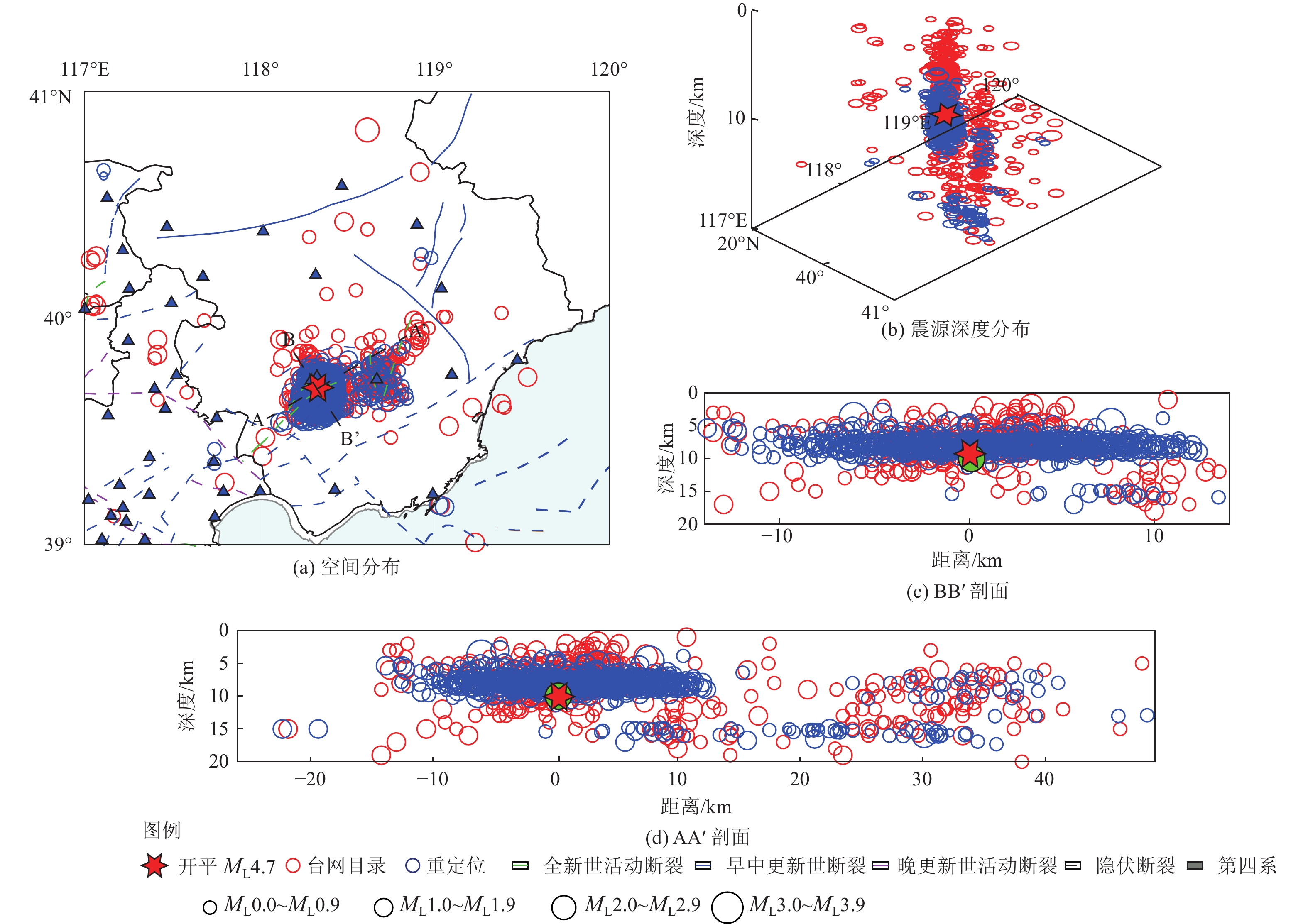
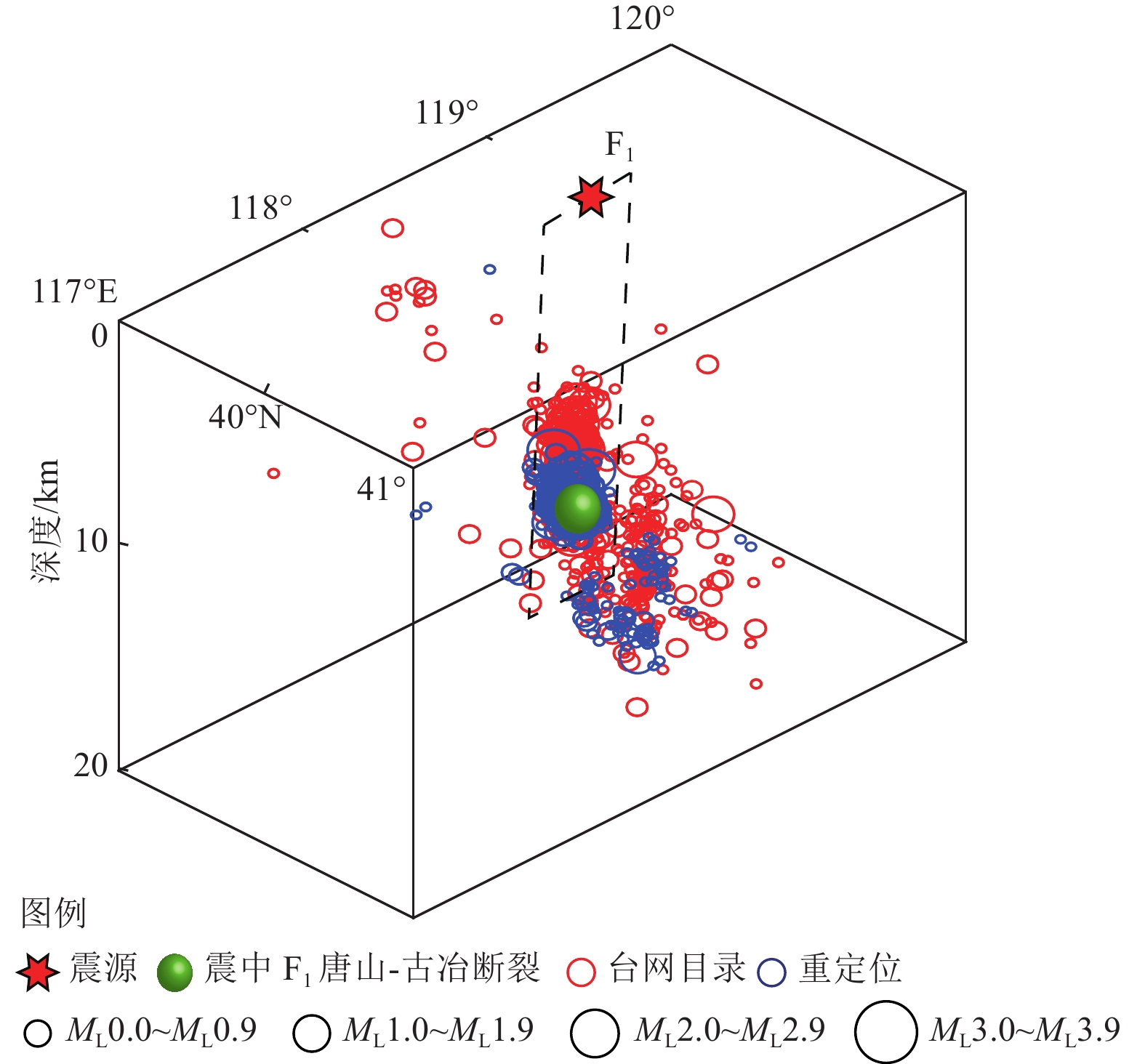
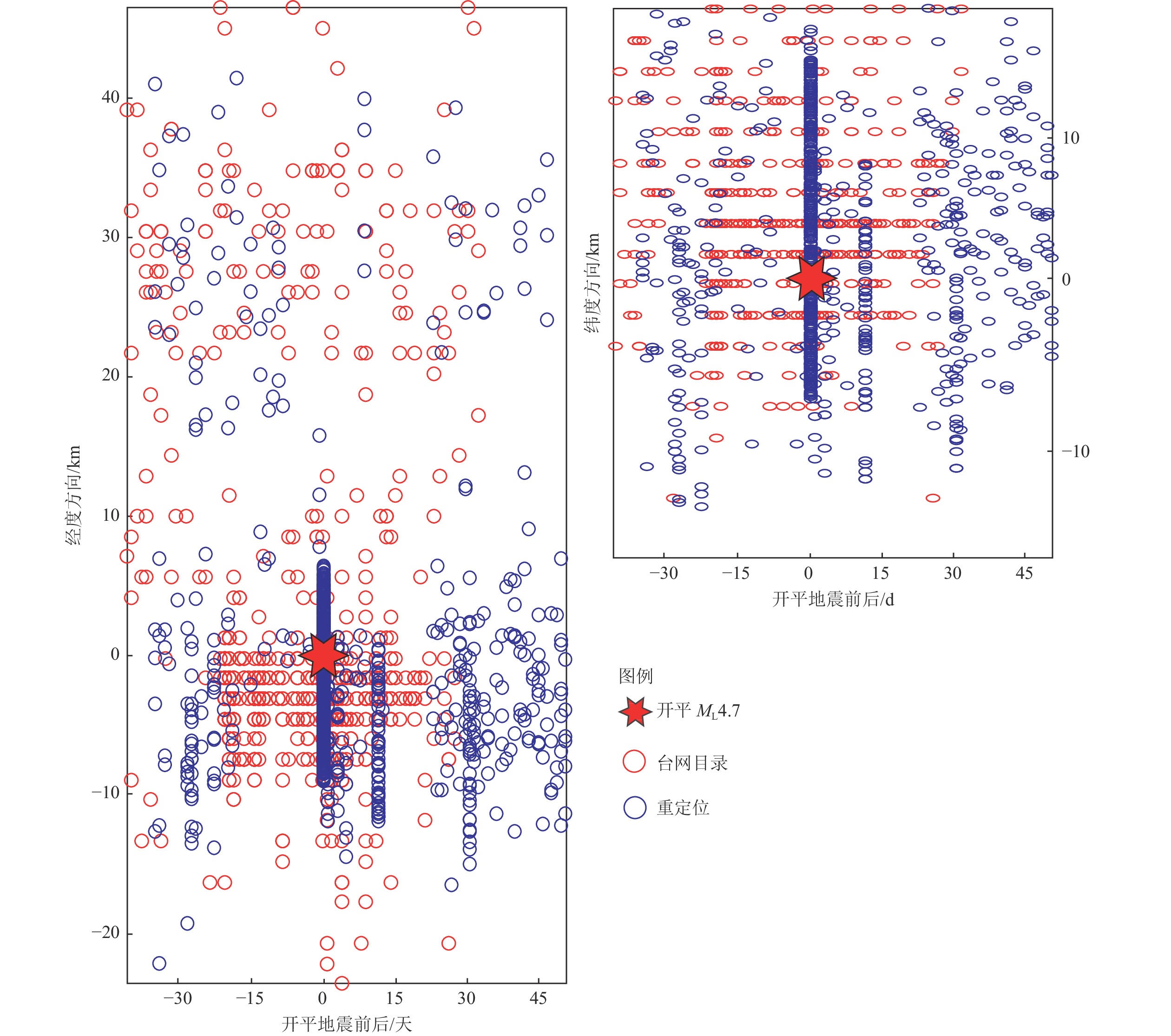
摘要: 2016年8月至2016年10月唐山余震区小震活动增强,尤其是8月21日至9月22日期间,其中9月10日发生震级最大地震为唐山开平ML4.7地震。为了解中强地震发震特征及地震序列变化,基于模板匹配定位识别技术,利用2016年8月1日至2016年10月31日连续波形进行唐山开平地震前后微震检测和定位。从研究区域内中国地震台网目录中选择283个地震事件作为模板事件,基于连续波形共检测识别出878个地震事件,其数量约为模板事件的3倍,约为中国地震台网目录的1.4倍,检测后的地震目录完备震级由原来的ML0.2 提升至ML−0.1。利用双差定位方法对847个地震事件进行重定位,结果显示震中附近小震活动频繁,且在唐山开平地震震中周边分布较集中。分析震群分布特征认为唐山开平地震属于唐山老震区正常地震活动,发震断层为唐山-古冶断裂的可能性较大。Abstract: From August to October, 2016, small seismic activity increased in Tangshan, especially from August 21 to September 22, The largest earthquake was a magnitude of ML4.7 seismic in Kaiping on September 10. In this paper, based on the continuous seismic data between August 1, 2016 and October 31, 2016 recorded by 37 seismic stations, we utilize the graphics processing unit based match & locate technology (be called GPU M&L) and double difference location algorithm methods(be called HypoDD) to study the microseismical sequence of the Kaiping ML4.7. Firstly, 283 seismic were selected as template from those seismic events provided by the China Earthquake Network Center. Secondly, we detected the 878 seismic events with GPU M&L, which are 3 times more than the template and 1.4 times more than the recorded by the China Earthquake Network Center, the complete magnitude of the seismic catalog decreases from ML0.2 of the network catalog to ML−0.1. Finally, 847 seismic events were accurately relocated using HypoDD, showing the activity of small seismic near the epicenter more strongly and the distribution more concentrated. According to the distribution of seismic groups, the Kaiping ML4.7 belongs to the normal seismic activity in the Tangshan and the seismogenic fault is the Tangshan- Guye fault.
-
Key words:
- Seismic activity /
- Template matching /
- Detection /
- Locate technology /
- Complete magnitude
-
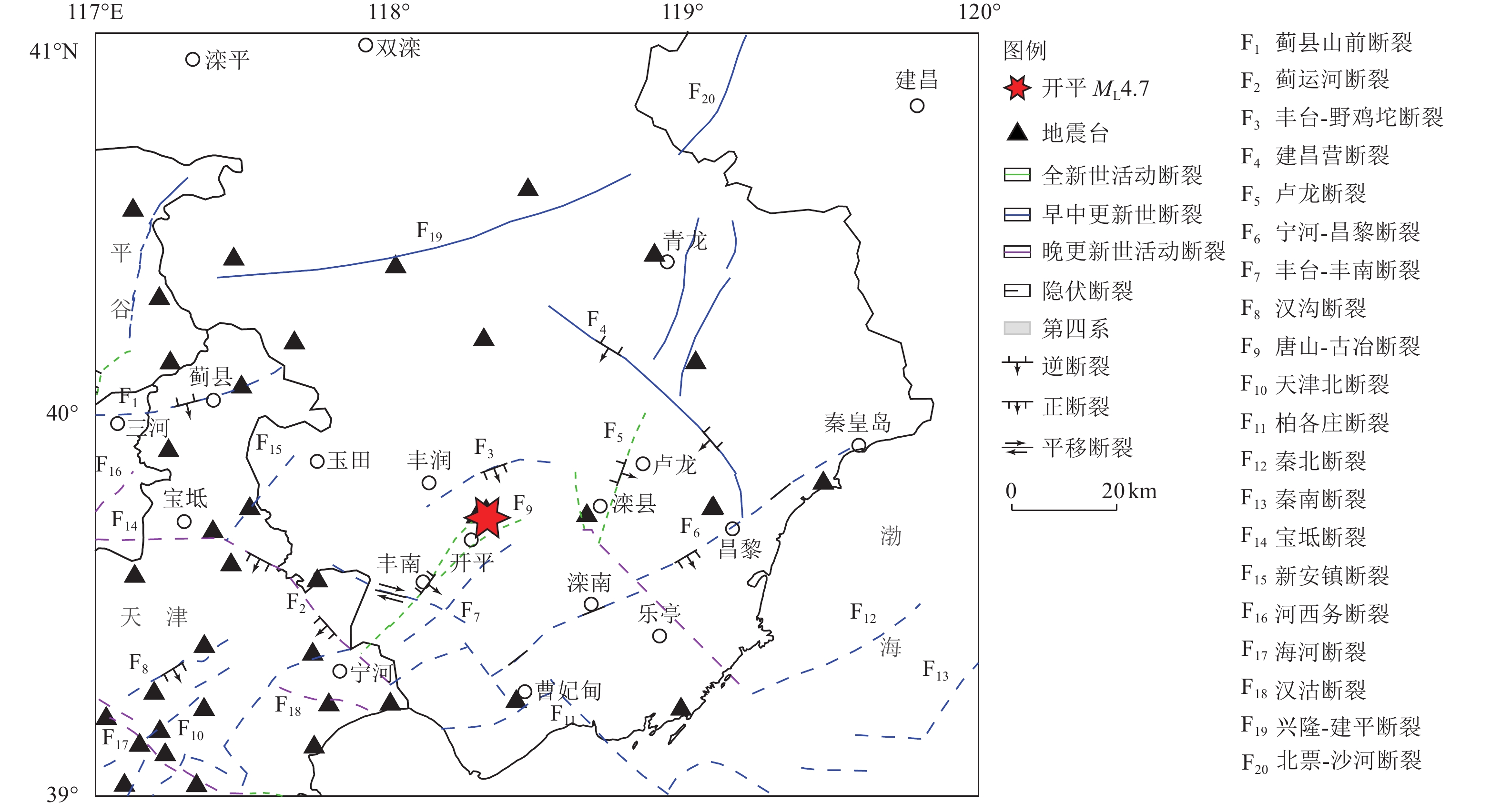
图 1 地震周边构造背景及观测站(点)分布
Figure 1. Geological structure surrounding the epicenter and distribution of observation point
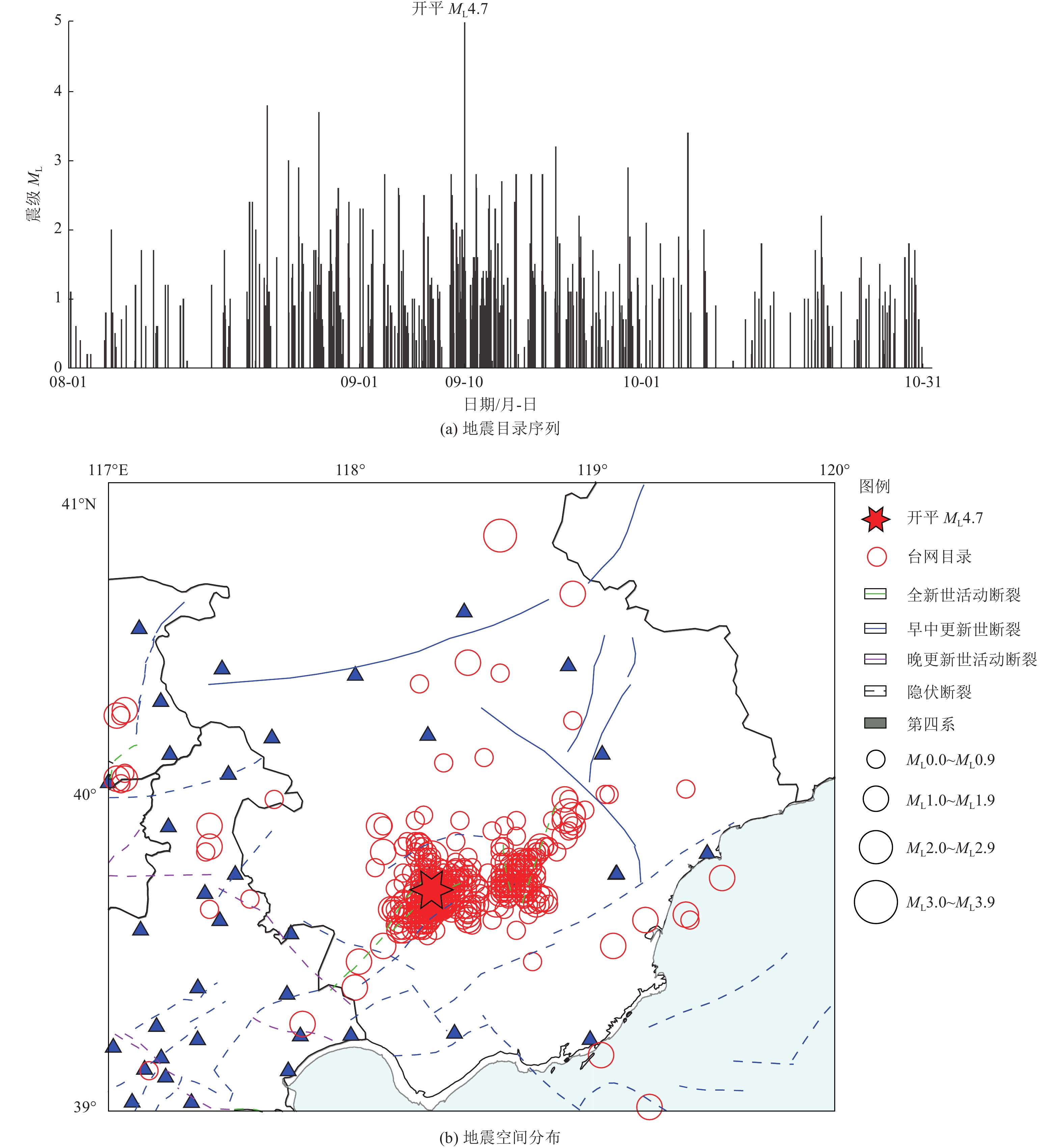
图 2 研究区域2016年8月至2016年10月台网地震目录序列与空间分布
Figure 2. Sequence and spatial distribution of network catalog from August to October 2016
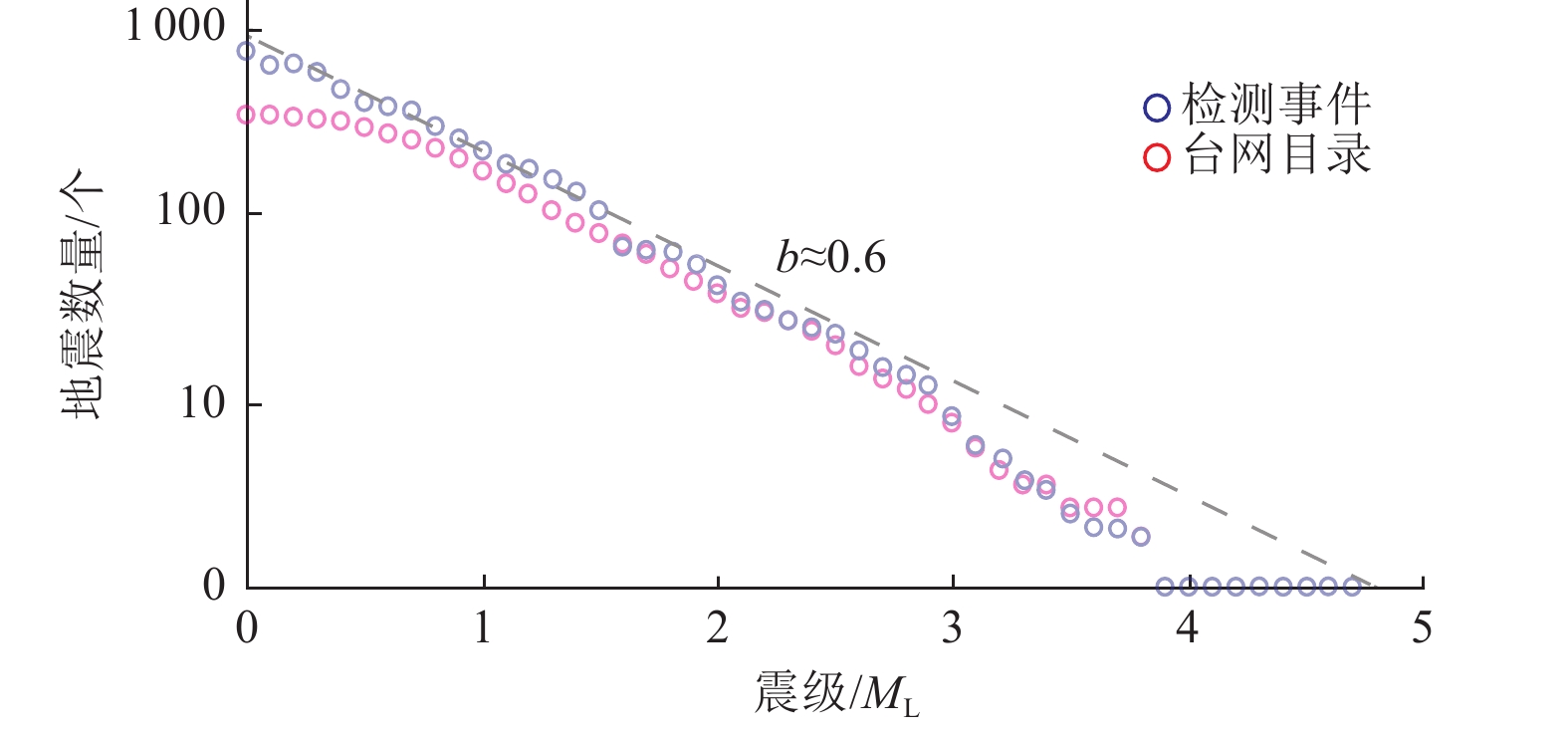
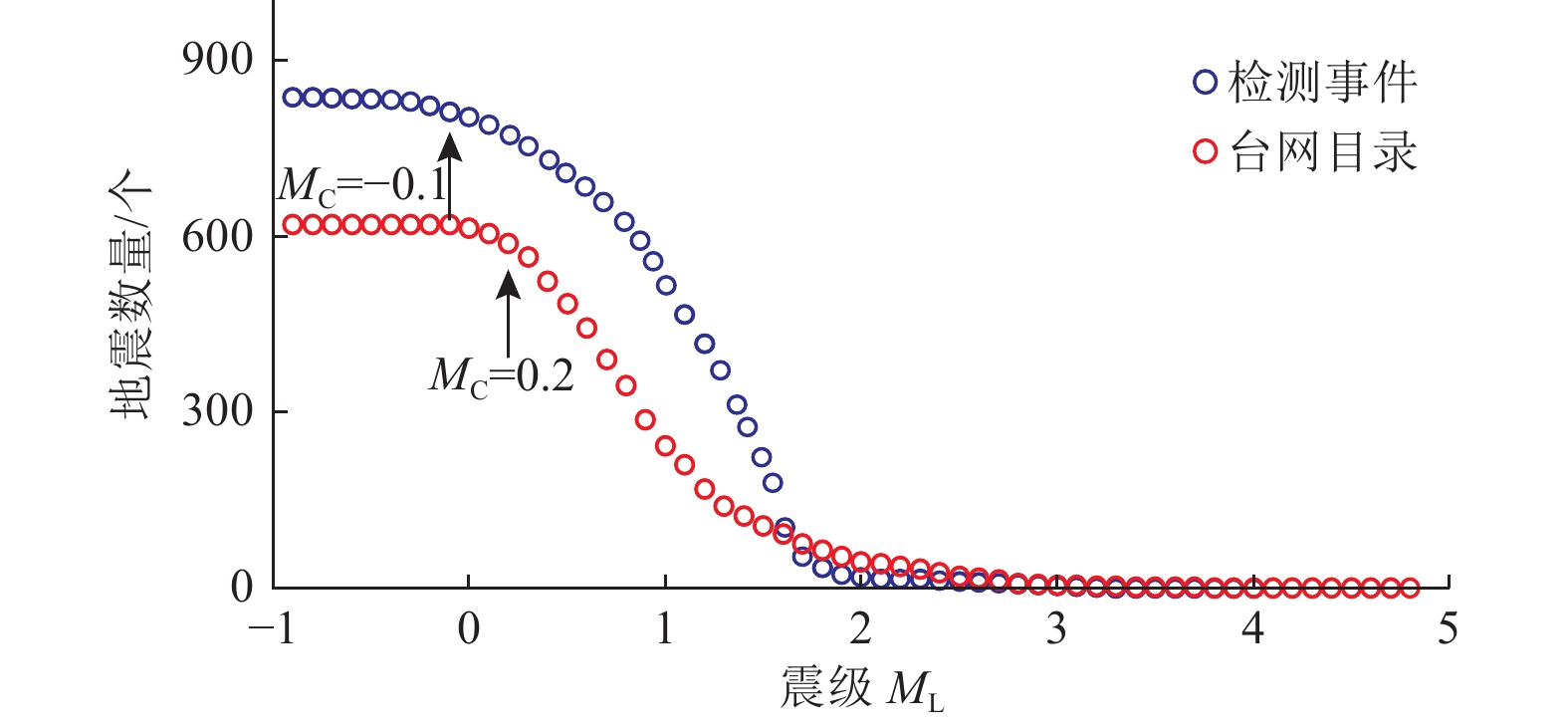
图 4 台网目录和检测地震目录b值拟合分析
Figure 4. Statistical catalogs analysis of b value between the network and the detection
-
房立华, 吴建平, 王未来等, 2013. 四川芦山MS7.0级地震及其余震序列重定位. 科学通报, 58(20): 1901—1909.Fang L. H. , Wu J. P. , Wang W. L. , et al. , 2013. Relocation of the mainshock and aftershock sequences of MS7.0 Sichuan Lushan earthquake. Chinese Science Bulletin, 58(28): 3451—3459. 国家地震局《一九七六年唐山地震》编辑组, 1982. 一九七六年唐山地震. 北京: 地震出版社. 虢顺民, 李志义, 程绍平等, 1977. 唐山地震区域构造背景和发震模式的讨论. 地质科学, 12(4): 305—321Guo S. M. , Li Z. Y. , Cheng S. P. , et al. , 1977. Discussion: on the recional structural background and the seismogenic model of the Tangshan earthquake. Chinese Journal of Geology, 12(4): 305—321. (in Chinese) 黄德瑜, 冯浩, 1981. 强震前大范围地震活动性参数的时空扫描. 地震学报, 3(3): 283—291Huang D. Y. , Feng H. , 1981. Time and space scanning of parameters of seismicity over a broad region before strong earthquakes. Acta Seismologica Sinica, 3(3): 283—291. (in Chinese) 黄玮琼, 时振梁, 曹学锋, 1989. b值统计中的影响因素及危险性分析中b值的选取. 地震学报, 11(4): 351—361Huang W. Q. , Shi Z. L. , Cao X. F. , 1989. Factors influencing the estimation of b value and the selection of b value in hazard analysis. Acta Seismologica Sinica, 11(4): 351—361. (in Chinese) 梁姗姗, 雷建设, 徐志国等, 2017.2016年1月21日青海门源MS6.4余震序列重定位和主震震源机制解. 地球物理学报, 60(6): 2091—2103 doi: 10.6038/cjg20170606Liang S. S. , Lei J. S. , Xu Z. G. , et al. , 2017. Relocation of the aftershock sequence and focal mechanism solutions of the 21 January 2016 Menyuan, Qinghai, MS6.4 earthquake. Chinese Journal of Geophysics, 60(6): 2091—2103. (in Chinese) doi: 10.6038/cjg20170606 廖诗荣, 杨婷, 张红才等, 2021.2021年云南双柏MS5.1地震序列的快速检测与精定位研究. 地震研究, 44(4): 515—520Liao S. R. , Yang T. , Zhang H. C. , et al. , 2021. Fast detection and relocation of the 2021 Shuangbai MS5.1 earthquake sequences in Yunnan. Journal of Seismological Research, 44(4): 515—520. (in Chinese) 马鸿庆, 1978. 华北地区几次大震前的b值异常变化. 地球物理学报, 21(2): 126—141Ma H. Q. , 1978. Variations of the b-values before several large earthquakes occurred in North China. Chinese Journal of Geophysics, 21(2): 126—141. (in Chinese) 任雪梅, 2011. 地震区划中b值统计的若干问题研究. 北京: 中国地震局地球物理研究所.Ren X. M., 2011. Study on the estimation of b value on seismic zontion. Beijing: Institute of Geophysics, China Earthquake Administration. (in Chinese) 谭毅培, 邓莉, 曹井泉等, 2016.2015年河北滦县震群发震机理分析. 地球物理学报, 59(11): 4113—4125 doi: 10.6038/cjg20161115Tan Y. P. , Deng L. , Cao J. Q. , 2016. Seismological mechanism analysis of 2015 Luanxian swarm, Hebei province. Chinese Journal of Geophysics, 59(11): 4113—4125. (in Chinese) doi: 10.6038/cjg20161115 王同利, 刘敏, 李红谊等, 2019. 阿拉善左旗MS5.8地震前后地震活动性分析和重定位. 地球物理学报, 62(6): 2038—2047 doi: 10.6038/cjg2019N0024Wang T. L. , Liu M. , Li H. Y. , et al. , 2019. Relocation of the aftershock sequence and activity of the MS5.8 Alxa earthquake. Chinese Journal of Geophysics, 62(6): 2038—2047. (in Chinese) doi: 10.6038/cjg2019N0024 王未来, 吴建平, 房立华等, 2014.2014年云南鲁甸MS6.5地震序列的双差定位. 地球物理学报, 57(9): 3042—3051 doi: 10.6038/cjg20140929Wang W. L. , Wu J. P. , Fang L. H. , et al. , 2014. Double difference location of the Ludian MS6.5 earthquake sequences in Yunnan province in 2014. Chinese Journal of Geophysics, 57(9): 3042—3051. (in Chinese) doi: 10.6038/cjg20140929 杨智娴, 陈运泰, 郑月军等, 2003. 双差地震定位法在我国中西部地区地震精确定位中的应用. 中国科学(D辑): 地球科学, 33(S1): 129—134.Yang Z. X., Chen Y. T., Zheng Y. J., et al., 2003. Accurate relocation of earthquakes in central-western China using the double-difference earthquake location algorithm. Science in China Series D: Earth Sciences, 46(2): 181—188. (in Chinese) 张雅楠, 李红谊, 张盛中等, 2023. 上海及邻区微震检测与定位. 地球物理学报, 66(3): 1113—1124 doi: 10.6038/cjg2022P0915Zhang Y. N. , Li H. Y. , Zhang S. Z. , et al. , 2023. Microseismic detection and location in Shanghai and its adjacent areas. Chinese Journal of Geophysics, 66(3): 1113—1124. (in Chinese) doi: 10.6038/cjg2022P0915 朱艾斓, 徐锡伟, 周永胜等, 2005. 川西地区小震重新定位及其活动构造意义. 地球物理学报, 48(3): 629—636 doi: 10.3321/j.issn:0001-5733.2005.03.021Zhu A. L. , Xu X. W. , Zhou Y. S. , et al. , 2005. Relocation of small earthquakes in western Sichuan, China and its implications for active tectonics. Chinese Journal of Geophysics, 48(3): 629—636. (in Chinese) doi: 10.3321/j.issn:0001-5733.2005.03.021 Crotwell H. P. , Owens T. J. , Ritsema J. , 1999. The TauP Toolkit: Flexible seismic travel-time and ray-path utilities. Seismological Research Letters, 70(2): 154—160. doi: 10.1785/gssrl.70.2.154 Felzer K. R. , Abercrombie R. E. , Ekström G. , 2004. A common origin for aftershocks, foreshocks, and multiplets. Bulletin of the Seismological Society of America, 94(1): 88—98. doi: 10.1785/0120030069 Gutenberg B., Richter C. F., 1954. Seismicity of the earth and associated phenomena. Princeton: Princeton University Press, 16—21. Hauksson E. , Shearer P. , 2005. Southern California hypocenter relocation with waveform cross-correlation, Part 1: results using the double-difference method. Bulletin of the Seismological Society of America, 95(3): 896—903. doi: 10.1785/0120040167 Helmstetter A. , Sornette D. , 2003 a. Foreshocks explained by cascades of triggered seismicity. Journal of Geophysical Research: Solid Earth, 108(B10): 2457. Helmstetter A. , Sornette D. , Grasso J. R. , 2003 b. Mainshocks are aftershocks of conditional foreshocks: How do foreshock statistical properties emerge from aftershock laws. Journal of Geophysical Research: Solid Earth, 108(B1): 2046. Liu M. , Li H. Y. , Zhang M. , et al. , 2020. Graphics processing unit-based match and locate (GPU-M&L): An improved match and locate method and its application. Seismological Research Letters, 91(2 A): 1019—1029. doi: 10.1785/0220190241 Rydelek P. A. , Sacks I. S. , 1989. Testing the completeness of earthquake catalogues and the hypothesis of self-similarity. Nature, 337(6204): 251—253. doi: 10.1038/337251a0 Vidale J. E. , Shearer P. M. , 2006. A survey of 71 earthquake bursts across southern California: Exploring the role of pore fluid pressure fluctuations and aseismic slip as drivers. Journal of Geophysical Research: Solid Earth, 111(B5): B05312. Zhang M. , Wen L. X. , 2015. An effective method for small event detection: match and locate (M&L). Geophysical Journal International, 200(3): 1523—1537. doi: 10.1093/gji/ggu466 -

 下载:
下载:
 点击查看大图
点击查看大图
图(7)
计量
- 文章访问数: 142
- HTML全文浏览量: 64
- PDF下载量: 10
- 被引次数: 0
