
Fine Simulation of Strong Ground Motion by MS6.9 Menyuan Earthquake, Qinghai
-
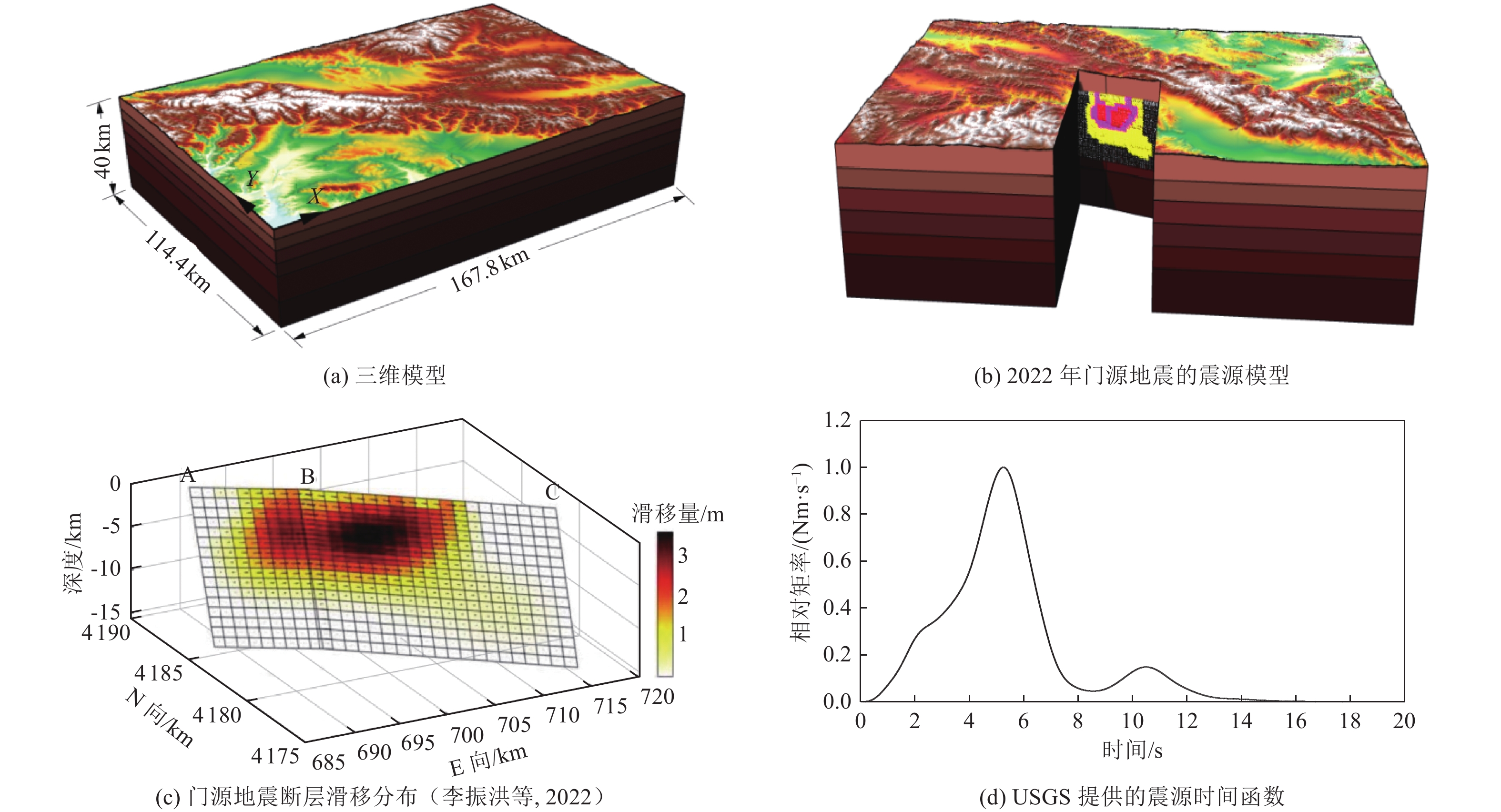
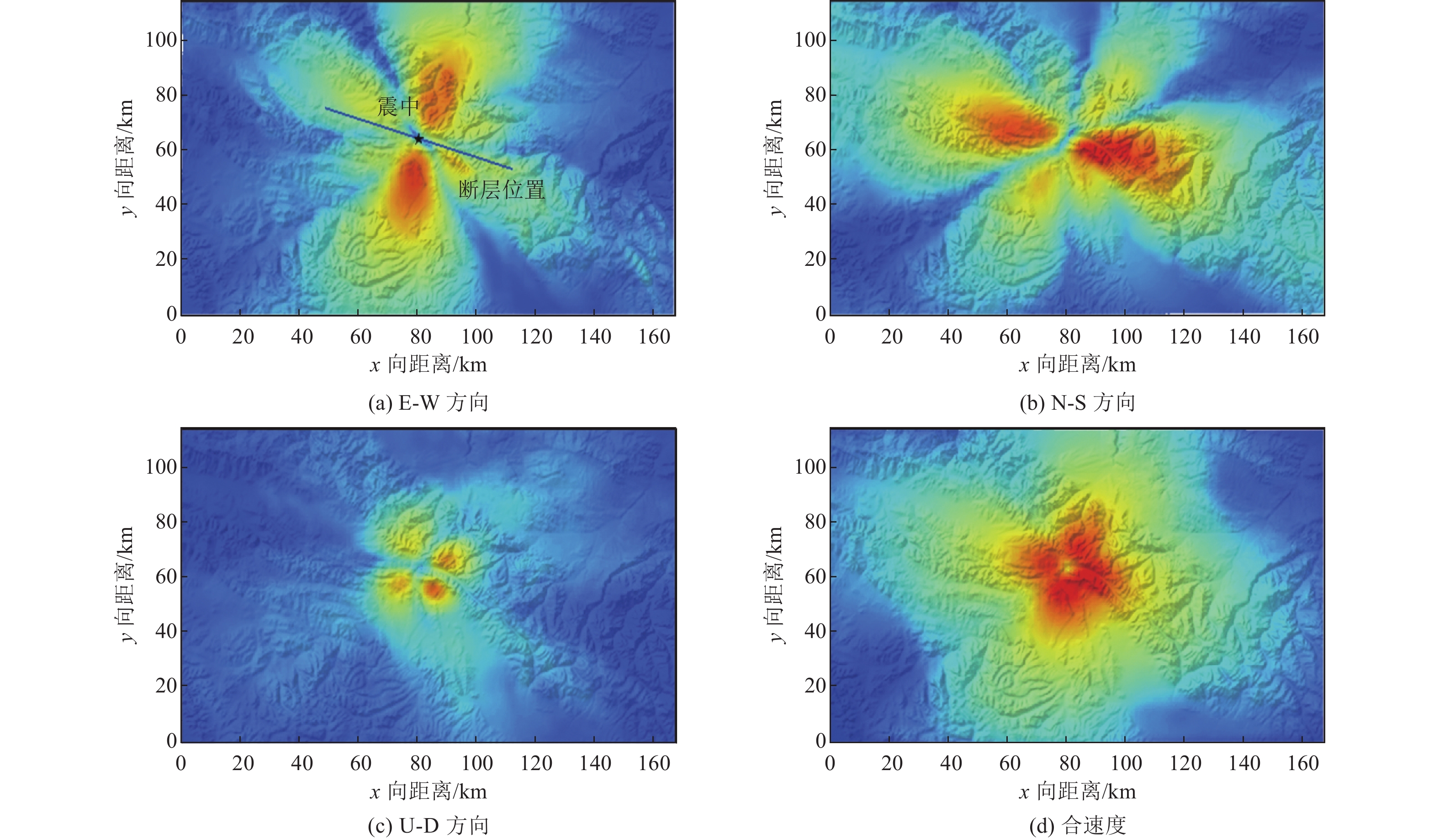
摘要: 2022年1月8日青海门源MS6.9地震是该地区有记录以来的第3次强震,未来仍有再次发生强震的可能。基于门源地区的地表高程、速度介质参数以及门源地震断层滑移分布等地形地质特征,采用谱元法精细化模拟青海门源地震的地震波传播过程,重点考察复杂起伏地形区域强地面运动的空间分布特征。结果表明,PGV较大的地方主要集中在断层附近,最大值为53.1 cm/s,且沿断层走向地震响应明显大于垂直断层走向,具有明显的地震方向性效应;地震波在断层两侧出现反应较为剧烈的波前,波场快照PGV可达47.2 cm/s,与实测烈度相近,且模拟给出的烈度分布特征与实测烈度分布规律相同;山体分布密集区域的PGV响应较为剧烈,山体附近的地震动持续时间也较长,而平坦区域的地震响应相对较弱;通过与强震记录对比,验证了本文方法的合理性与准确性。研究成果可为地形复杂山体区域地震预测及防震减灾提供一定的参考。Abstract: The MS6.9 Menyuan, Qinghai, earthquake on January 8, 2022 is the third strong earthquake recorded in the region, and it is possible to occur again in the future. Based on the topographical and geological characteristics of the Menyuan region, such as surface elevation, velocity media parameters, and fault slip distribution of the Menyuan earthquake, the spectral element method is used to finely simulate the seismic wave propagation process of the Menyuan earthquake in Qinghai province, and the spatial distribution characteristics of strong ground motion in the region with complex topography are investigated. The results show that the locations with larger PGV are mainly concentrated near the fault, the maximum value is 53.1 cm/s, and the ground motion response along the fault strike is obviously greater than that perpendicular to the fault strike, which shows the significant earthquake directivity effect; The seismic wave has a relatively violent front response on the both sides of fault, the PGV from wave field snapshot can reach 47.2 cm/s, which is close to the measured intensity, and the intensity distribution characteristics derived by simulation are the same as the distribution law of measured intensity; The PGV in the region with dense distribution of mountain is relatively intense, and the ground motion duration near the mountain is also long, while the seismic response in the flat region is relatively weak; The rationality and accuracy of the method proposed in this paper have been verified by comparing the simulated results with the strong earthquake records. The research results can provide a certain reference for the earthquake prediction, the earthquake prevention and disaster reduction in the mountain region with complex topography.
-
Key words:
- Menyuan earthquake /
- Mountain region /
- Ground motion /
- Spectral element method
1)1 2http://speed.mox.polimi.it/download/ 2)2 3https://mp.weixin.qq.com/s/IGp1dw7KfFY3PiwWT2WY6A -
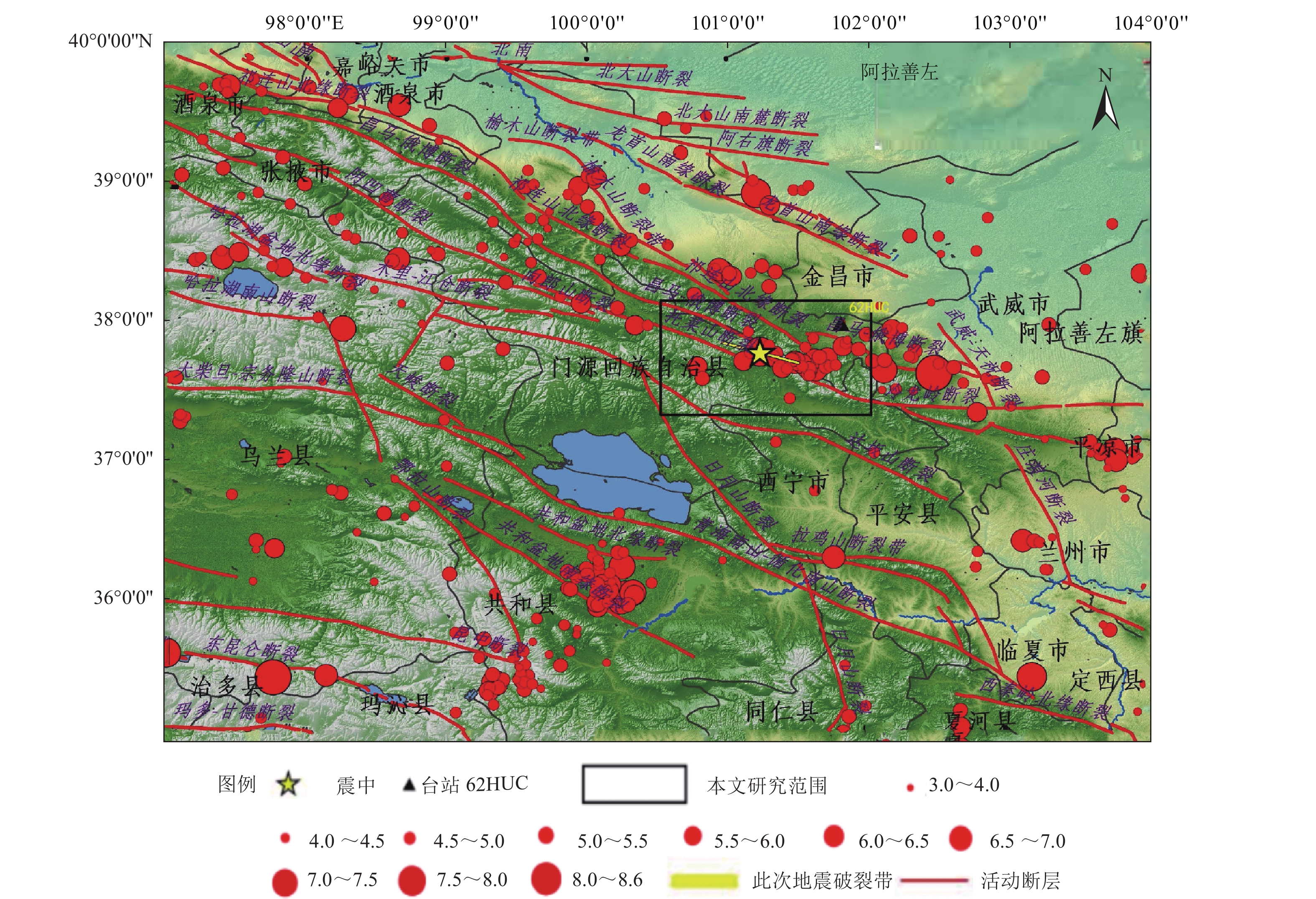
图 1 MS6.9门源地震发震构造及历史地震活动
Figure 1. Seismogenic structure and historical seismicity around the MS6.9 Menyuan earthquake
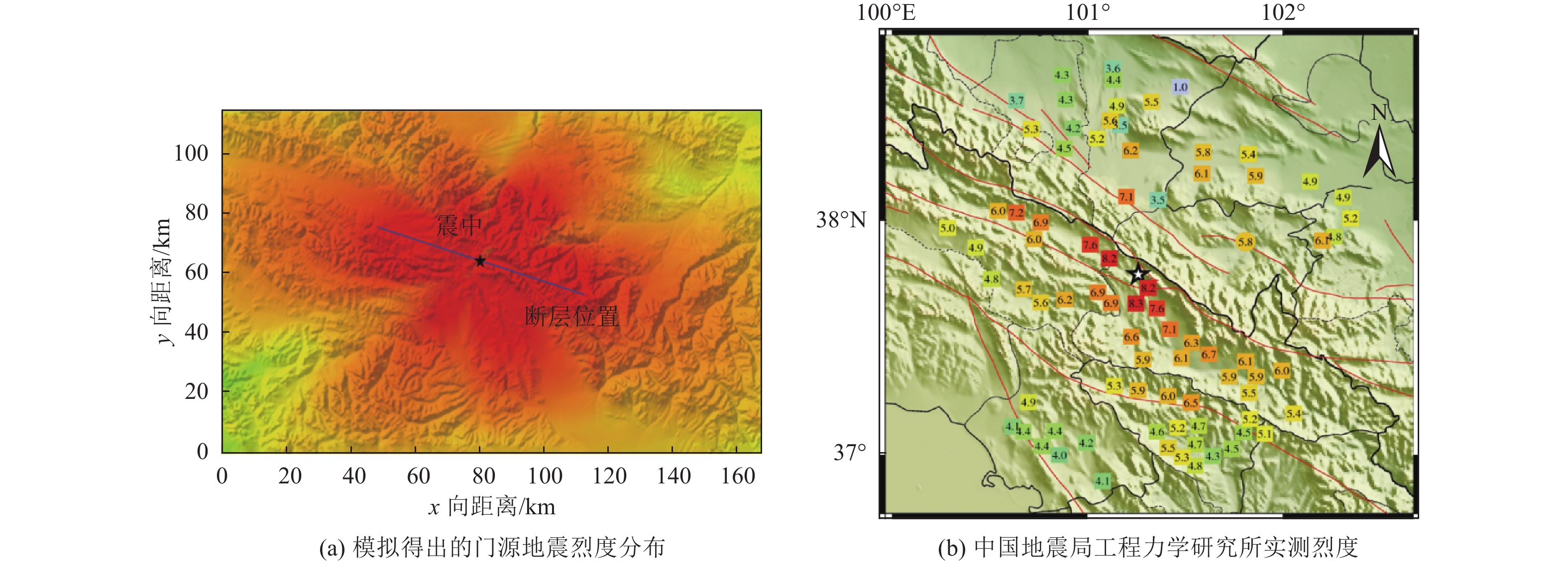
图 7 模拟结果与实测烈度对比
Figure 7. Comparison between the simulated result and the measured intensity
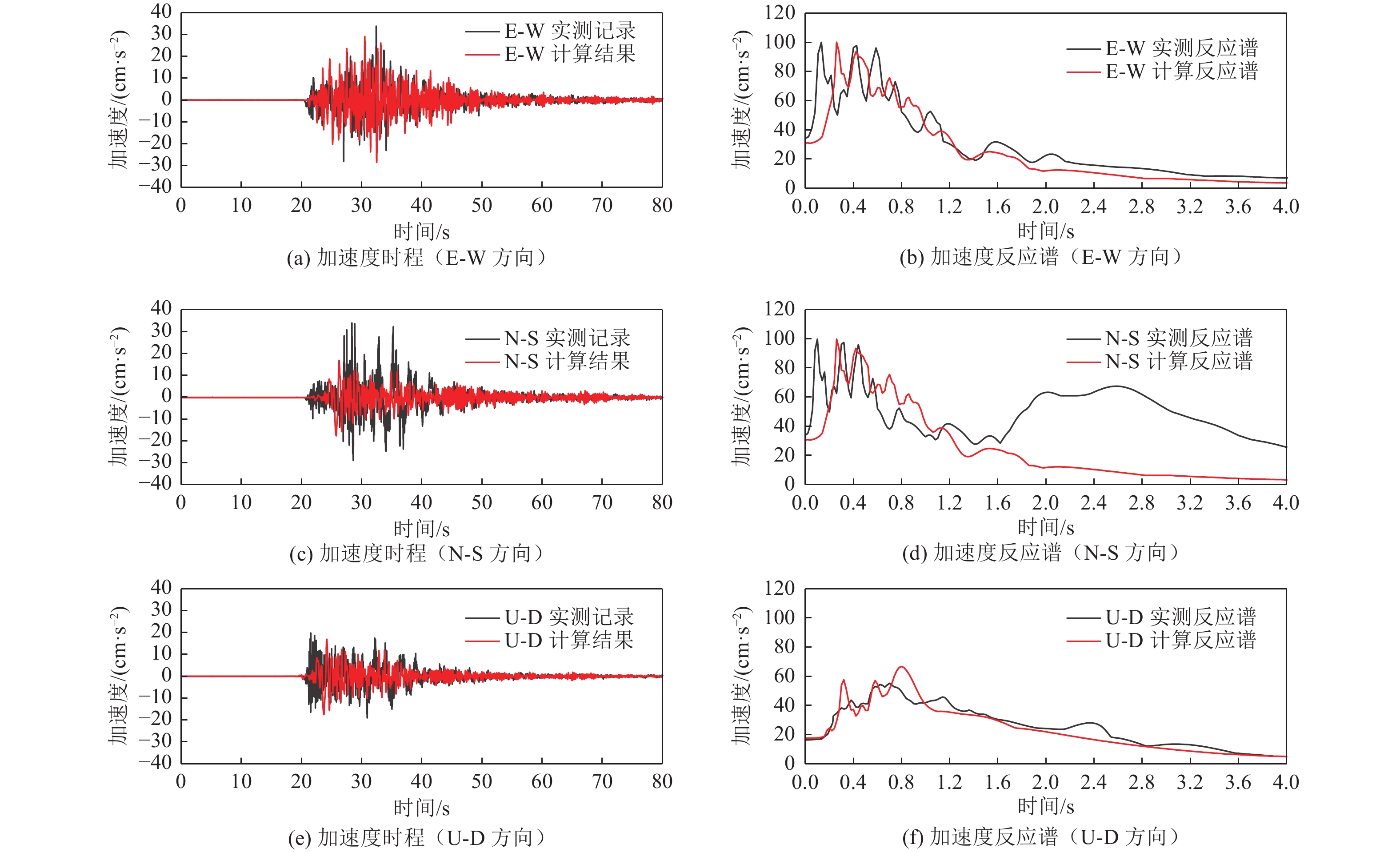
图 8 模拟结果与台站记录对比
Figure 8. Comparison between the simulated results and the station records
表 1 地层介质参数
Table 1. Stratum media parameters
地层序号 层底深度/km ρ/(kg·m−3) Vs/(m·s−1) Vp/(m·s−1) ${Q_{\text{s}}}$ ${Q_{\text{p}}}$ 1 5 2110 3640 6076 364 608 2 10 2720 3609 6049 361 605 3 15 2790 3609 6040 361 604 4 20 2790 3660 6150 366 615 5 30 2790 3683 6176 368 618 6 40 2790 3766 6199 376 620  下载: 导出CSV
下载: 导出CSV
-
巴振宁, 赵靖轩, 吴孟桃等, 2021. 基于逆断层动力学模型的三维山体地震动谱元法模拟. 地震工程与工程振动, 41(3): 32—42 doi: 10.13197/j.eeev.2021.03.32.bazn.004Ba Z. N. , Zhao J. X. , Wu M. T. , et al. , 2021. Three-dimensional ground motion spectral element method simulation based on inverse fault dynamics model. Earthquake Engineering and Engineering Dynamics, 41(3): 32—42. (in Chinese) doi: 10.13197/j.eeev.2021.03.32.bazn.004 戴丹青, 杨志高, 孙丽, 2023. 2022年1月8日青海门源MS6.9地震破裂过程. 地震学报, 44. doi: 10.11939/jass. 20220032.Dai D. Q., Yang Z. G., Sun L., 2023. Rupture process of the MS6.9 Menyuan, Qinghai, earthquake on January 8, 2022. Acta Seismologica Sinica, 44. doi: 10.11939/jass.20220032. (in Chinese) 国家市场监督管理总局, 国家标准化管理委员会, 2020. GB/T 17742—2020 中国地震烈度表. 北京: 中国标准出版社, 1—11State Administration for Market Regulation, Standardization Administration of the People's Republic of China, 2020. GB/T 17742—2020 The Chinese seismic intensity scale. Beijing: Standards Press of China, 1—11. (in Chinese) 韩立波, 2022.2022年青海门源MS6.9地震震源机制解. 地震科学进展, 52(2): 49—54Han L. B. , 2022. Focal mechanism of 2022 Menyuan MS6.9 earthquake in Qinghai Province. Progress in Earthquake Sciences, 52(2): 49—54. (in Chinese) 胡元鑫, 刘新荣, 罗建华等, 2011. 汶川震区地震动三维地形效应的谱元法模拟. 兰州大学学报(自然科学版), 47(4): 24—32Hu Y. X. , Liu X. R. , Luo J. H. , et al. , 2011. Simulation of three-dimensional topographic effects on seismic ground motion in Wenchuan earthquake region based upon the spectral-element method. Journal of Lanzhou University (Natural Sciences), 47(4): 24—32. (in Chinese) 李振洪, 韩炳权, 刘振江等, 2022. InSAR数据约束下2016年和2022年青海门源地震震源参数及其滑动分布. 武汉大学学报·信息科学版, 47(6): 887—897 doi: 10.13203/j.whugis20220037Li Z. H. , Han B. Q. , Liu Z. J. , et al. , 2022. Source parameters and slip distributions of the 2016 and 2022 Menyuan, Qinghai Earthquakes constrained by InSAR observations. Geomatics and Information Science of Wuhan University, 47(6): 887—897. (in Chinese) doi: 10.13203/j.whugis20220037 刘中宪, 刘明珍, 韩建斌, 2017. 近断层沉积盆地强地震动谱元模拟. 世界地震工程, 33(4): 76—86Liu Z. X. , Liu M. Z. , Han J. B. , 2017. Spectral-element simulation of strong ground motion in the near-fault alluvial basin. World Earthquake Engineering, 33(4): 76—86. (in Chinese) 徐剑侠, 张振国, 戴文杰等, 2015.2015年4月25日尼泊尔地震波场传播及烈度初步模拟分析. 地球物理学报, 58(5): 1812—1817Xu J. X. , Zhang Z. G. , Dai W. J. , et al. , 2015. Preliminary simulation of seismic wave propagation and the intensity map for the 25 April 2015 Nepal earthquake. Chinese Journal of Geophysics, 58(5): 1812—1817. (in Chinese) 许英才, 郭祥云, 冯丽丽, 2022.2022年1月8日青海门源MS6.9地震序列重定位和震源机制解研究. 地震学报, 44(2): 195—210 doi: 10.11939/jass.20220008Xu Y. C. , Guo X. Y. , Feng L. L. , 2022. Relocation and focal mechanism solutions of the MS6.9 Menyuan earthquake sequence on January 8, 2022 in Qinghai Province. Acta Seismologica Sinica, 44(2): 195—210. (in Chinese) doi: 10.11939/jass.20220008 尹晓菲, 王芃, 张伟等, 2022.2022年1月8日青海门源MS6.9地震强地面运动模拟及烈度分布估计. 地震学报, 44(2): 237—244Yin X. F. , Wang P. , Zhang W. , et al. , 2022. Strong ground motion simulation and intensity distribution estimation for the MS6.9 Menyuan, Qinghai, earthquake on 8 January 2022. Acta Seismologica Sinica, 44(2): 237—244. (in Chinese) 于彦彦, 2016. 三维沉积盆地地震效应研究. 哈尔滨: 中国地震局工程力学研究所.Yu Y. Y., 2016. Research on seismic effects of three-dimensional sedimentary basins. Harbin: Institute of Engineering Mechanics, China Earthquake Administration. (in Chinese) 朱音杰, 罗艳, 赵里, 2023. 区域宽频地震波形反演所揭示的2022年1月青海门源MS6.9地震震源破裂过程. 地震学报, 45(3): 1—15 doi: 10.11939/jass.20220163Zhu Y. J. , Luo Y. , Zhao L. , 2023. Rupture process of the January 2022 Menyuan, Qinghai MS6.9 earthquake revealed by inversion of regional broadband seismograms. Acta Seismologica Sinica, 45(3): 1—15. (in Chinese) doi: 10.11939/jass.20220163 左可桢, 陈继锋, 2018. 门源地区地壳三维体波速度结构及地震重定位研究. 地球物理学报, 61(7): 2788—2801Zuo K. Z. , Chen J. F. , 2018.3 D body-wave velocity structure of crust and relocation of earthquakes in the Menyuan area. Chinese Journal of Geophysics, 61(7): 2788—2801. (in Chinese) Abraham J. R. , Smerzini C. , Paolucci R. , et al. , 2016. Numerical study on basin-edge effects in the seismic response of the Gubbio valley, Central Italy. Bulletin of Earthquake Engineering, 14(6): 1437—1459. doi: 10.1007/s10518-016-9890-y Komatitsch D. , Tromp J. , 1999. Introduction to the spectral element method for three-dimensional seismic wave propagation. Geophysical Journal International, 139(3): 806—822. doi: 10.1046/j.1365-246x.1999.00967.x Li Y. S. , Jiang W. L. , Li Y. J. , et al. , 2022. Coseismic rupture model and tectonic implications of the January 7 2022, Menyuan MW6.6 earthquake constraints from InSAR observations and field investigation. Remote Sensing, 14(9): 2111. doi: 10.3390/rs14092111 Liu M. , Li H. Y. , Peng Z. G. , et al. , 2019. Spatial-temporal distribution of early aftershocks following the 2016 MS 6.4 Menyuan, Qinghai, China Earthquake. Tectonophysics, 766: 469—479. doi: 10.1016/j.tecto.2019.06.022 Magnoni F. , Casarotti E. , Michelini A. , et al. , 2014. Spectral-element simulations of seismic waves generated by the 2009 L’Aquila earthquake. Bulletin of the Seismological Society of America, 104(1): 73—94. doi: 10.1785/0120130106 Patera A. T. , 1984. A spectral element method for fluid dynamics: laminar flow in a channel expansion. Journal of Computational Physics, 54(3): 468—488. doi: 10.1016/0021-9991(84)90128-1 Peyrusse F. , Glinsky N. , Gélis C. , et al. , 2014. A nodal discontinuous Galerkin method for site effects assessment in viscoelastic media-Verification and validation in the Nice basin. Geophysical Journal International, 199(1): 315—334. doi: 10.1093/gji/ggu256 Pilz M. , Parolai S. , Stupazzini M. , et al. , 2011. Modelling basin effects on earthquake ground motion in the Santiago de Chile basin by a spectral element code. Geophysical Journal International, 187(2): 929—945. doi: 10.1111/j.1365-246X.2011.05183.x Vijaya R. , Boominathan A. , Mazzieri I. , 2020. 3 D ground response analysis of simplified Kutch basin by spectral element method. Journal of Earthquake and Tsunami, 14(1): 2050003. doi: 10.1142/S1793431120500037 Xie J. J. , Wang W. C. , An Z. , et al. , 2023. Quantification of rupture directivity effects on strong ground motion during the 8 January 2022 MS6.9 Menyuan earthquake in Qinghai, China. Frontiers in Earth Science, 10: 1068536. doi: 10.3389/feart.2022.1068536 -


 点击查看大图
点击查看大图
计量
- 文章访问数: 195
- HTML全文浏览量: 49
- PDF下载量: 26
- 被引次数: 0
