
Differences of Microtretors Observed by Earthquake Early Warning Instruments and Feasibility for Evaluating Site Conditions
-
摘要: 根据台站场地条件进行地震动参数校正,有助于提高地震预警的有效性和准确性。针对我国地震预警台网中部分台址场地条件信息不完整及观测仪器的多样性,通过采用不同灵敏度的力平衡式加速度仪、速度仪和MEMS烈度仪,同时进行大量不同类别场地的地脉动观测,多角度对比分析时、频差别,探讨基于地震预警仪观测地脉动评价场地条件的可行性。结果表明,加速度仪灵敏度越高,H/V谱比卓越频率越易识别;速度仪与力平衡式加速度仪观测的地脉动,三分向傅氏谱和H/V谱比的谱形与卓越频率均一致;与TAG-33M强震仪相比,TMA-53烈度仪观测的地脉动整体幅值略高,波形较差,但随着振幅增大趋于一致;在近80%的场地上,TAG-33M强震仪与TMA-53烈度仪观测的地脉动傅氏谱卓越频率相差<0.5 Hz;当幅值均方根值>0.05 Gal时,TAG-33M强震仪与TMA-53烈度仪观测的地脉动竖向和水平向傅氏谱均趋于一致;当幅值均方根值为0.02 Gal~0.05 Gal时,TAG-33M强震仪与TMA-53烈度仪观测的地脉动竖向和水平向傅氏谱谱形均有较高的相似性;当幅值均方根值<0.02 Gal时,TAG-33M强震仪与TMA-53烈度仪观测的地脉动傅氏谱谱形相差较大,相似性低;依据TAG-33M强震仪观测地脉动H/V谱比的卓越频率判定场地类别,准确率达83.3%;TMA-53烈度仪观测地脉动的H/V谱比过于平坦,大多数场地上卓越频率识别困难。Abstract: The accuracy of earthquake early warning can be improved by calibration according to site conditions. The site conditions of many observation stations are unknown and different kinds of observation instruments are deployed in the stations of national earthquake early warning network. The microtremors are observed continuously for a long time at the same site by the different instruments, including force-balanced accelerometers, MEMS accelerometers, and velocimeters with different sensitivities. Then the time and frequency differences were compared and analyzed and the feasibility of evaluating the site conditions was discussed. The results show that the higher the sensitivity of the accelerometer, the easier it is to identify the predominant frequency of H/V spectrum; The Fourier spectra of three components and the H/V spectra of the microtremor observed by velocimeters and force-balance accelerometers are approximately the same; Compared with TAG-33M (Force-balance Accelerometer), the amplitudes of microtremors observed by TMA-53(MEMS Accelerometer) are slightly higher and the qualities of waveforms are poor, but they tends to be consistent with the increase of amplitude; The predominant frequency differences of Fourier spectra are less than 0.5 Hz at nearly 80% sites; When the amplitude root mean square (RMS) is greater than 0.05 Gal, the vertical and horizontal Fourier spectra of the two tend to be consistent; When RMS is in the range of 0.02 Gal~0.05 Gal, the vertical and horizontal Fourier spectra of the two have high similarity; When RMS is less than 0.02 gal, the Fourier spectra of the two are quite different and have low similarities; According to the predominant frequency of H/V spectra observed by TAG-33M, the accuracy of site classification is 83.3%; The H/V spectra of the microtremor observed by TMA-53 are too flat to identify predominant frequency on most sites.
-
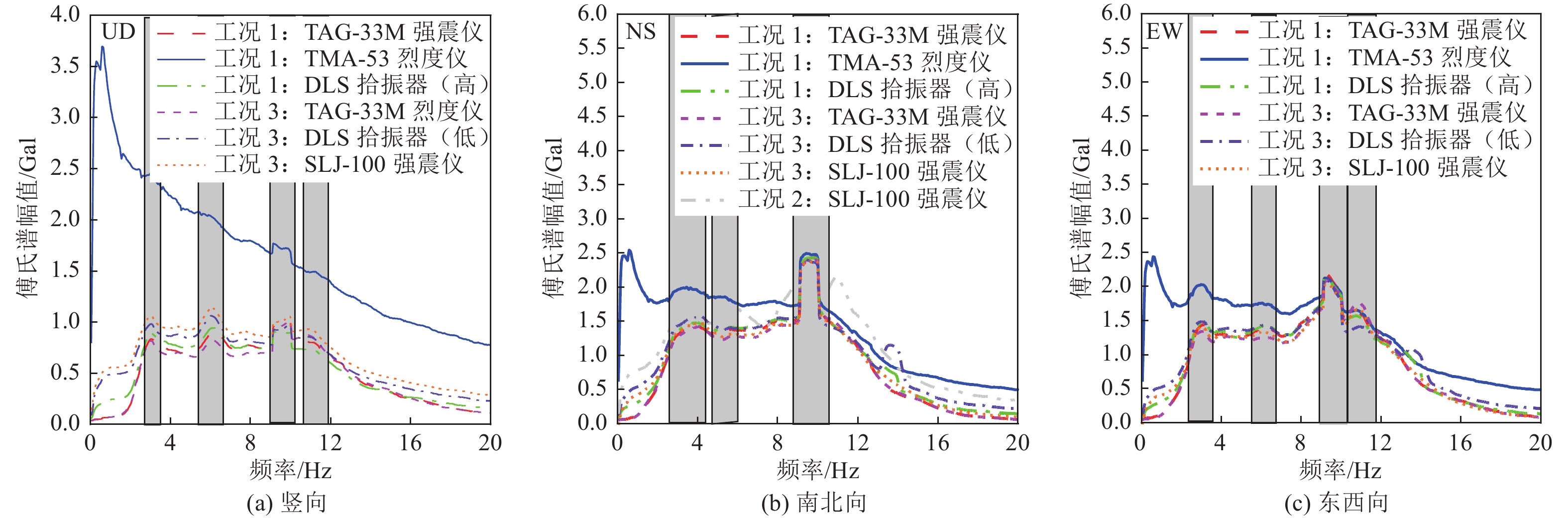
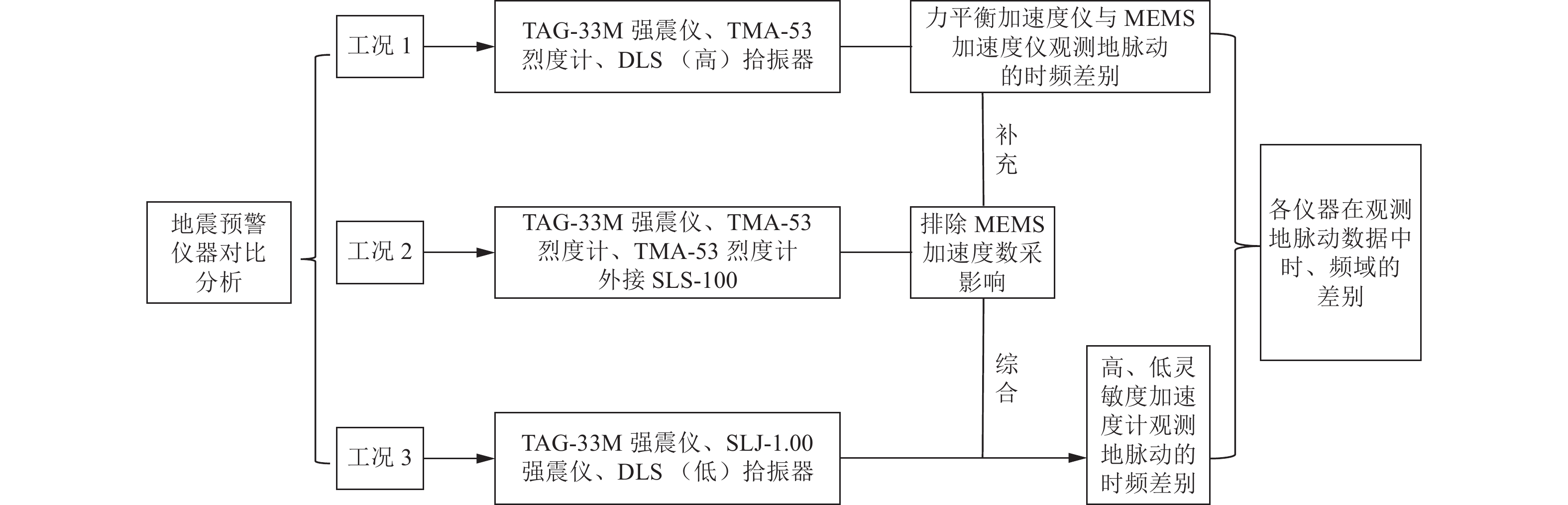
图 6 工况1~3下地脉动三分向傅氏谱
Figure 6. Microtremors Fourier spectra of UD,NS and EW component under observation condition 1~3

图 7 工况1、3下的地脉动H/V谱比
Figure 7. Microtremors H/V spectra under observation condition 1、3

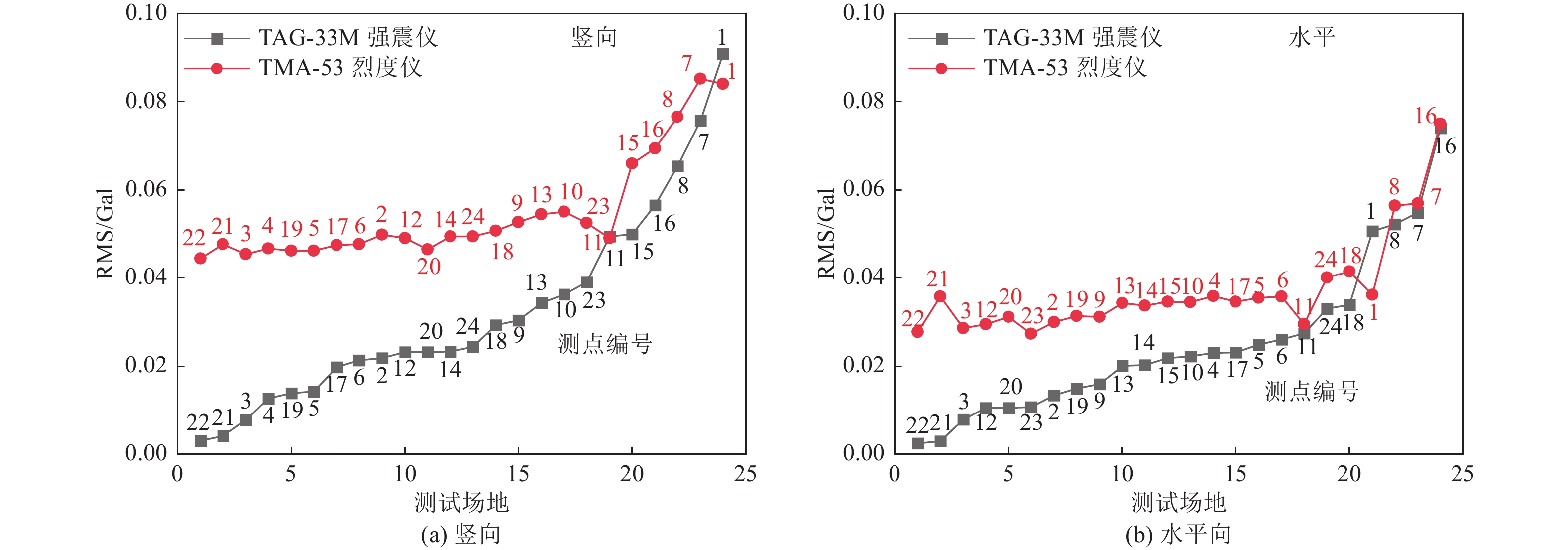
图 9 24个场地TMA-53烈度仪和TAG-33M强震仪观测地脉动竖向傅氏谱
Figure 9. Microtremor Fourier spectra of vertical component for 24 sites by TMA-53 and TAG-33M
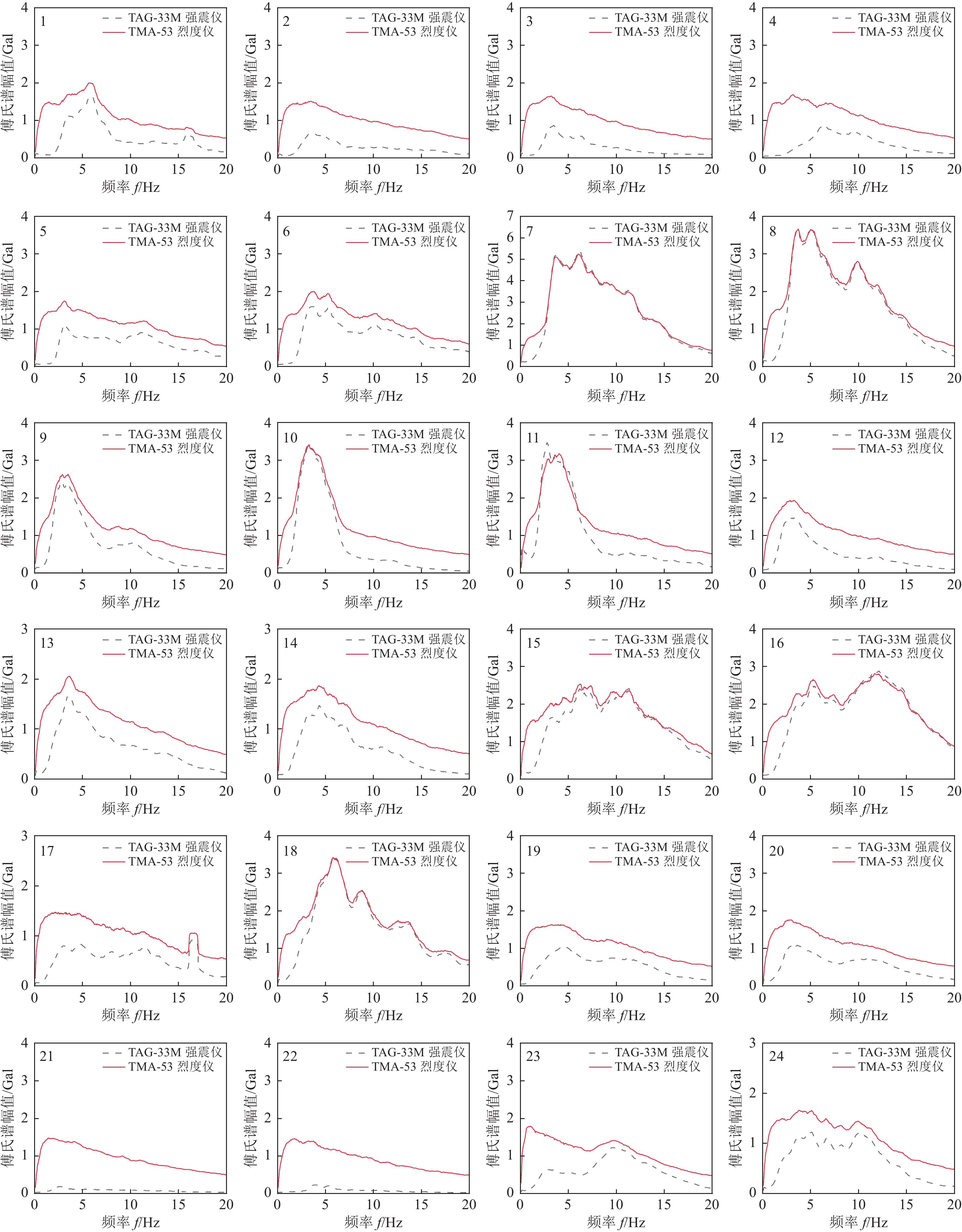
图 10 24个场地TMA-53烈度仪和TAG-33M强震仪观测地脉动水平向傅氏谱
Figure 10. Microtremor Fourier Spectra of horizontal component for 24 sites by TMA-53 and TAG-33M

图 11 24个场地TMA-53烈度仪与TAG-33M强震仪观测地脉动竖向、水平向傅氏谱卓越频率的差值
Figure 11. Predominant frequency differences of microtremors Fourier spectra by TMA-53 and TAG-33M at 24 sites

图 12 24个场地TMA-53烈度仪与TAG-33M强震仪观测地脉动傅氏谱间的欧氏距离
Figure 12. Euclidean distances between microtremors Fourier spectra by TMA-53 and TAG-33M at 24 sites
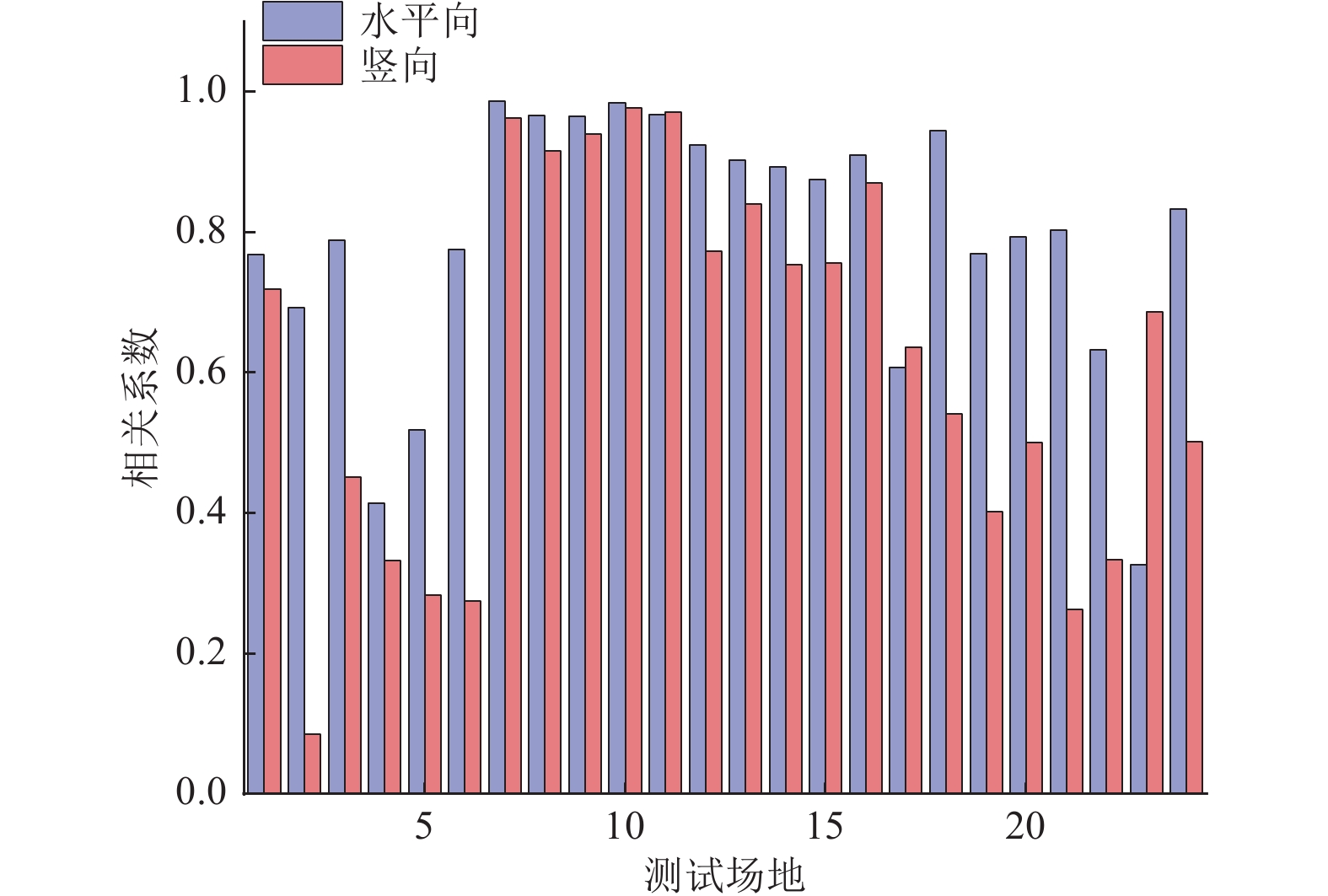
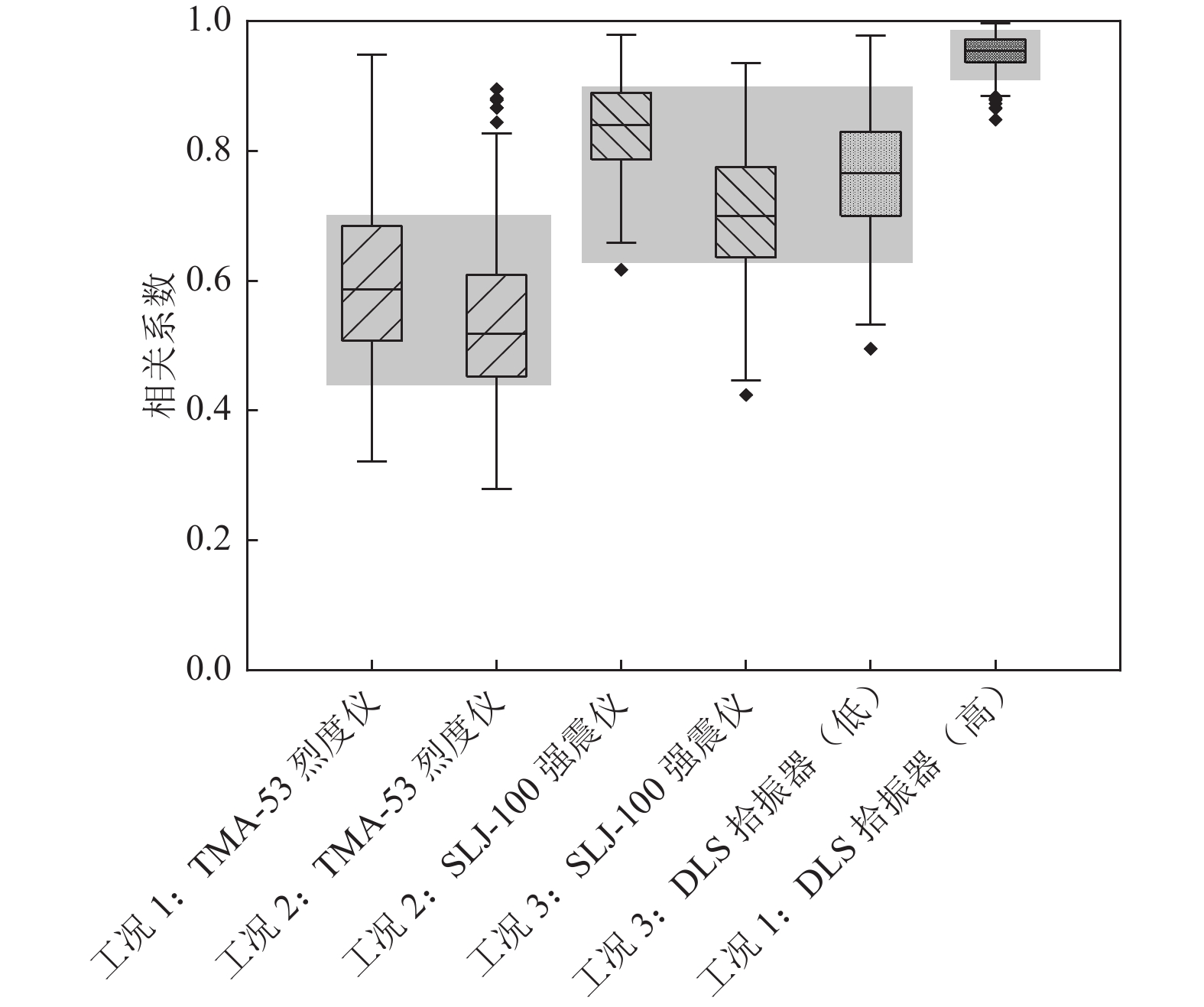
图 13 24个场地TMA-53烈度仪与TAG-33M强震仪观测地脉动傅氏谱相关系数
Figure 13. Correlation coefficients between microtremors Fourier spectra by TMA-53 and TAG-33M at 24 sites
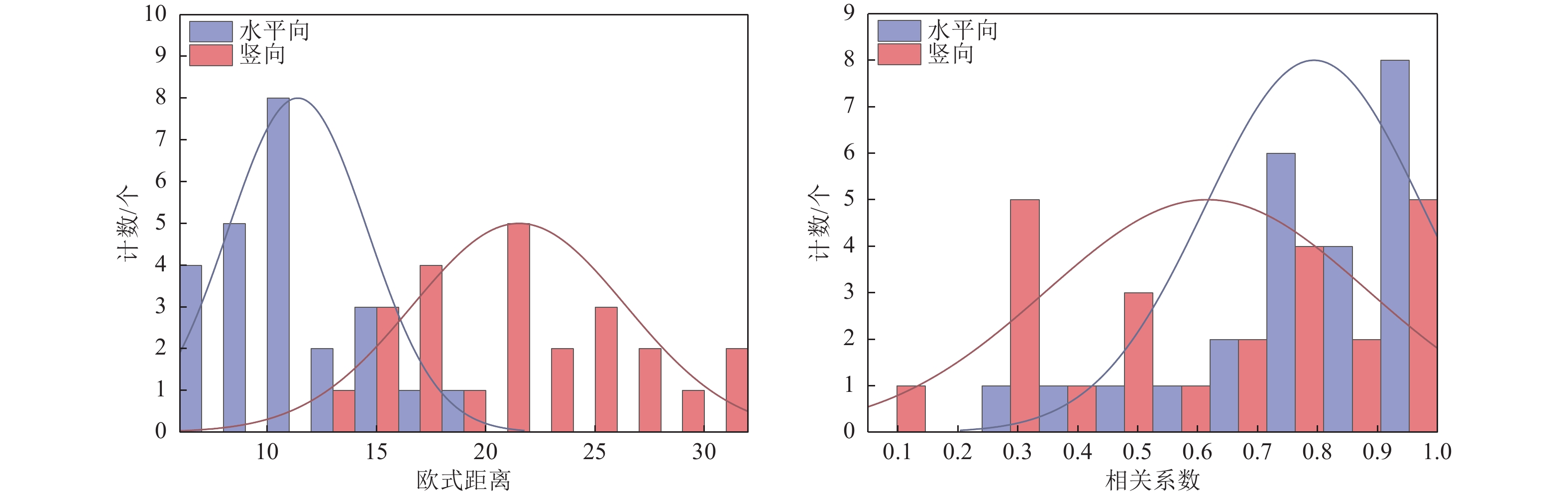
图 14 24个场地TMA-53烈度仪与TAG-33M强震仪观测地脉动傅氏谱水平向与竖向欧式距离、相关系数统计分布
Figure 14. Histogram of Euclidean distances and correlation coefficients between microtremors Fourier spectra at 24 sites
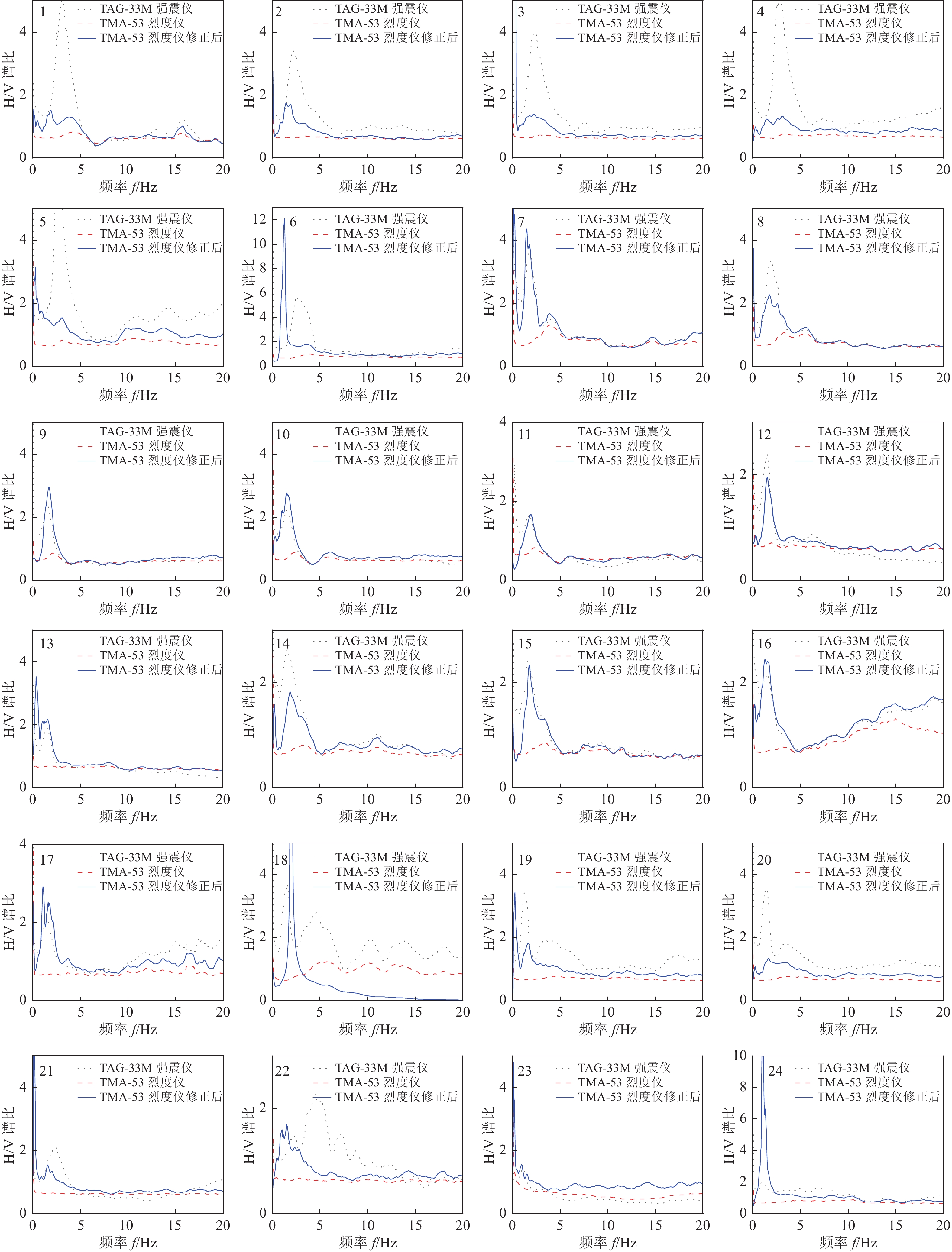
图 15 24个场地TMA-53烈度仪和TAG-33 M强震仪观测地脉动H/V谱比
Figure 15. Microtremor H/V Spectra for 24 sites by TMA-53 and TAG-33 M
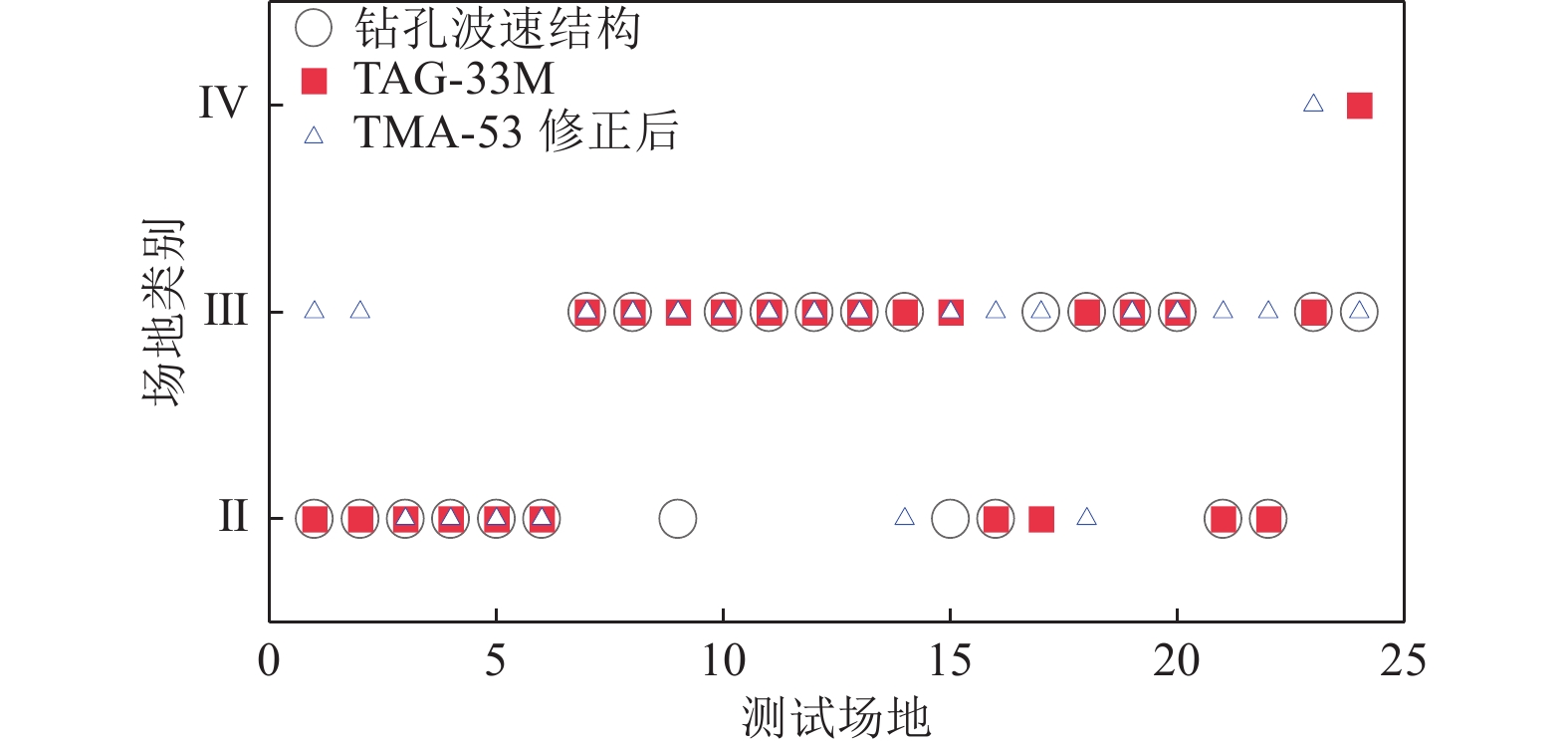
图 16 基于H/V谱比卓越频率的场地分类
Figure 16. Site classification by microtremors H/V spectra predominant frequencies
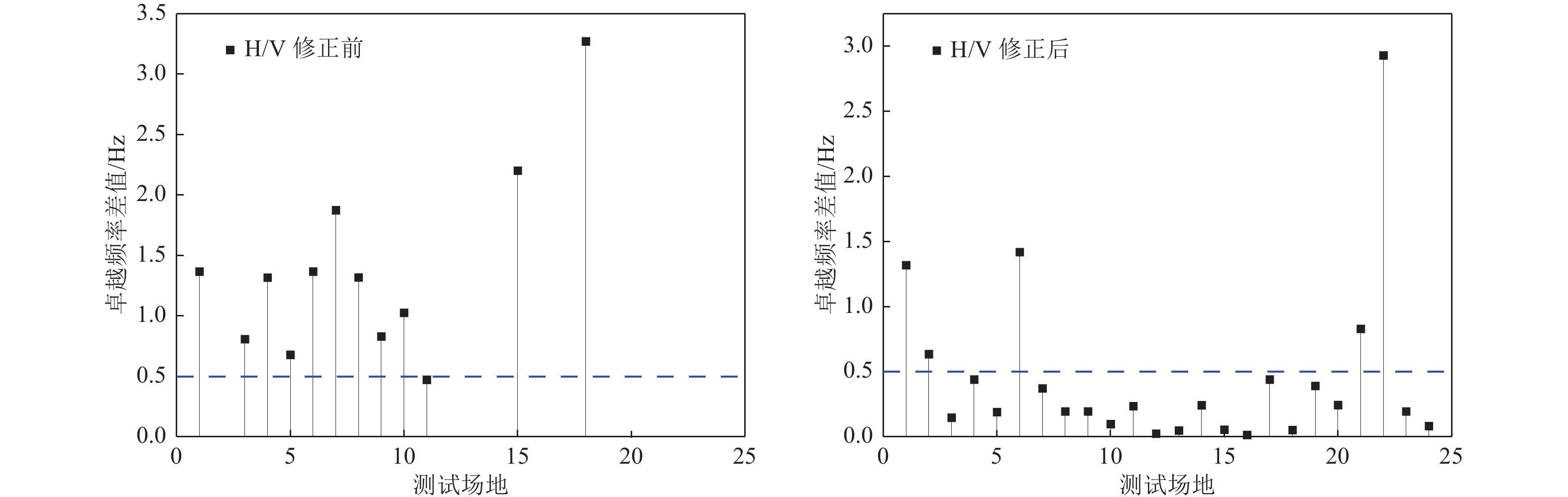
图 17 24个场地TMA-53烈度仪和TAG-33 M强震仪观测地脉动H/V谱比卓越频率差值
Figure 17. Differences of microtremor H/V spectra predominant frequencies for 24 sites by TMA-53 and TAG-33 M
表 1 地脉动观测仪器基本参数
Table 1. Basic parameters of the microtremors observation instruments
参数 仪器名称 TAG-33 M DLS SLJ-100 TMA-53 仪器类型 强震仪 拾振器 强震仪 烈度仪 传感器类型 三分量力平衡式
加速度计三分量力平衡式
加速度计/三分向速度计三分量力平衡式
加速度计正交三分量MEMS工艺力
平衡式加速度计测量范围/gn ±2 ±2 ±2 ±2 带宽/Hz 200 — 80 40 A/D转换/bit 24 24 24 24 系统动态范围/dB ≥134 — ≥135 >90 灵敏度 3 146 Ct/Gal 2 000 V/g,10 V/g,2 000 V·s/m 2.5 V/g 500 Ct/Gal  下载: 导出CSV
下载: 导出CSV
-
陈盛扬, 2019. 基于聚类分析的地脉动单点谱比应用研究. 哈尔滨: 中国地震局工程力学研究所.Chen S. Y., 2019. Application research of cluster analysis on Micro-tremor’s H/V spectra. Harbin: Institute of Engineering Mechanics, China Earthquake Administration. (in Chinese) 李昌珑, 2013. 基于MEMS加速度传感器的地震烈度监测技术研究与实现. 武汉: 中国地震局地震研究所.Li C. L., 2013. Research and achievement on earthquake intensity monitoring technology based on MEMS accelerometer. Wuhan: Institute of Seismology, China Earthquake Administration. (in Chinese) 彭菲, 王伟君, 寇华东, 2020. 三河—平谷地区地脉动H/V谱比法探测: 场地响应、浅层沉积结构及其反映的断层活动. 地球物理学报, 63(10): 3775—3790 doi: 10.6038/cjg2020O0025Peng F. , Wang W. J. , Kou H. D. , 2020. Microtremer H/V spectral ratio investigation in the Sanhe-Pinggu area: site responses, shallow sedimentary structure, and fault activity revealed. Chinese Journal of Geophysics, 63(10): 3775—3790. (in Chinese) doi: 10.6038/cjg2020O0025 师黎静, 陈盛扬, 2020. 基于地脉动单点谱比的场地特征参数测定方法适用性研究. 振动与冲击, 39(11): 138—145 doi: 10.13465/j.cnki.jvs.2020.11.018Shi L. J. , Chen S. Y. , 2020. The applicability of site characteristic parameters measurement based on micro-tremor’s H/V spectra. Journal of Vibration and Shock, 39(11): 138—145. (in Chinese) doi: 10.13465/j.cnki.jvs.2020.11.018 师黎静, 刘佳轩, 陈盛扬, 2022. 基于地脉动H/V谱比卓越周期的场地类别划分. 振动与冲击, 41(13): 34—42, 51 doi: 10.13465/j.cnki.jvs.2022.13.005Shi L. J. , Liu J. X. , Chen S. Y. , 2022. Site classification based on predominant period of microtremor’s H/V spectral ratio. Journal of Vibration and Shock, 41(13): 34—42, 51. (in Chinese) doi: 10.13465/j.cnki.jvs.2022.13.005 王光冲, 吴鹏, 李小军等, 2019. 基于背景噪声的烈度仪、强震计及地震计性能对比分析. 地震地磁观测与研究, 40(5): 109—113Wang G. C. , Wu P. , Li X. J. , et al. , 2019. Comparison and analysis of intensity meter, strong seismometer and seismometer based on background noise. Seismological and Geomagnetic Observation and Research, 40(5): 109—113. (in Chinese) 王浩, 丁炜, 2013. MEMS加速度计与传统地震加速度计的比较研究. 大地测量与地球动力学, 33(S2): 93—95Wang H. , Ding W. , 2013. Comparison among MEMS accelerometer and traditional seismometer. Journal of Geodesy and Geodynamics, 33(S2): 93—95. (in Chinese) 温瑞智, 冀昆, 任叶飞等, 2015. 基于谱比法的我国强震台站场地分类. 岩石力学与工程学报, 34(6): 1236—1241 doi: 10.13722/j.cnki.jrme.2014.0760Wen R. Z. , Ji K. , Ren Y. F. , et al. , 2015. Site classification for strong earthquake stations in china using spectral ratio method. Chinese Journal of Rock Mechanics and Engineering, 34(6): 1236—1241. (in Chinese) doi: 10.13722/j.cnki.jrme.2014.0760 张帝, 2019. 基于钻孔地脉动分析土层剪切波速. 烟台: 烟台大学.Zhang D., 2019. Analysis of soil shear wave velocity based on borehole microtremor. Yantai: Yantai University. (in Chinese) 张红才, 金星, 王士成等, 2017. 烈度仪记录与强震及测震记录的对比分析——以2015年河北昌黎ML4.5地震为例. 地震学报, 39(2): 273—285 doi: 10.11939/jass.2017.02.010Zhang H. C. , Jin X. , Wang S. C. , et al. , 2017. Comparative analyses of records by seismic intensity instrument with strong ground motion records and seismograph stations records: taking the $ {M}_{\mathrm{L}} $ 4.5 Changli earthquake of Hebei Province for an example. Acta Seismologica Sinica, 39(2): 273—285. (in Chinese) doi: 10.11939/jass.2017.02.010张谦, 2012. 基于地脉动观测的城市地区工程场地动参数及反演地下结构的研究. 北京: 北京交通大学.Zhang Q., 2012. The study of the dynamic parameters in urban areas of engineering site based on microtremor observation and inversion of underground structures. Beijing: Beijing Jiaotong University. (in Chinese) 中国地震局, 2019. DB/T 17—2018 地震台站建设规范 强震动台站. 北京: 中国质检出版社.China Earthquake Administration, 2019. DB/T 17—2018 Specification for the construction of seismic station-Strong motion station. Beijing: China Quality Inspection Press. (in Chinese) Cochran E. S. , Lawrence J. F. , Kaiser A. , et al. , 2011. Comparison between low-cost and traditional MEMS accelerometers: a case study from the M7.1 Darfield, New Zealand, aftershock deployment. Annals of Geophysics, 54(6): 728—737. Laouami N. , Hadid M. , Mezouar N. , 2018. Proposal of an empirical site classification method based on target simulated horizontal over vertical spectral ratio. Bulletin of Earthquake Engineering, 16(12): 5843—5874. doi: 10.1007/s10518-018-0420-y Peterson J. R. , 1993. Observations and modeling of seismic background noise. Reston: U. S. Geological Survey, 93—322. Sanchez, 2017. Geoseismic microzonation of the metropolitan area of colima-villa de Alvarez, Mexico. In: 15 th World Conference on Earthquake Engineering. LISBON, Portugal. 2012 Shanker D. , Panthi A. , Singh H. N. , 2012. Long-term seismic hazard analysis in Northeast Himalaya and its adjoining regions. Geosciences, 2(2): 25—32. doi: 10.3390/geosciences2020025 -



 点击查看大图
点击查看大图
计量
- 文章访问数: 307
- HTML全文浏览量: 65
- PDF下载量: 28
- 被引次数: 0
