
Research on Seismic Simulation Environment Test Method of Microwave Imaging Life Detector
-
摘要: 破坏性地震发生后,埋压人员的快速搜索是地震救援工作成功的重要因素。微波成像生命探测仪作为当前废墟搜索的装备之一,近年来得到了广泛应用。但救援队利用现有综合训练场地进行该类装备的测试方法,在装备针对性测试和深度功能认知方面存在着一定局限性,影响了微波成像生命探测仪的现场使用效率和技术发展。为此,本文在充分调研国内外主流地震模拟废墟训练场地的基础上,提出了相关的改进意见,结合汶川地震废墟三维采集数据和队伍实战经验,给出微波搜索装备综合测试方法,并在国家地震紧急救援训练基地完成了测试平台的搭建,取得较好的装备测试效果,为应急救援装备电子化和标准化测试提供参考。Abstract: After the destructive earthquake, the rapid search of buried survivors is an important success factor of earthquake rescue work. As one of the equipment for searching ruins, microwave imaging life detector has been widely used in recent years. However, the rescue team using the existing comprehensive training environment to test this kind of equipment has some limitations in the special test and deep functional cognition. These shortcomings affect the on-site using efficiency and technology development of microwave imaging life detector. In view of the above problems, based on the full investigation of the international mainstream earthquake simulation ruins training site, in this paper , we put forward some suggestions for improvement, and combined the three-dimensional acquisition data of Wenchuan earthquake ruins and the actual combat experience of the team to give a comprehensive test method of microwave search equipment. The test platform was built at the National Earthquake Emergency Rescue Training Base and good test results were achieved. This work will provide an important reference for the future electronic and standardized test of emergency rescue equipment.
-
Key words:
- Earthquake rescue /
- Life detector /
- Test environment /
- Microwave radar /
- Earthquake simulation ruins
-
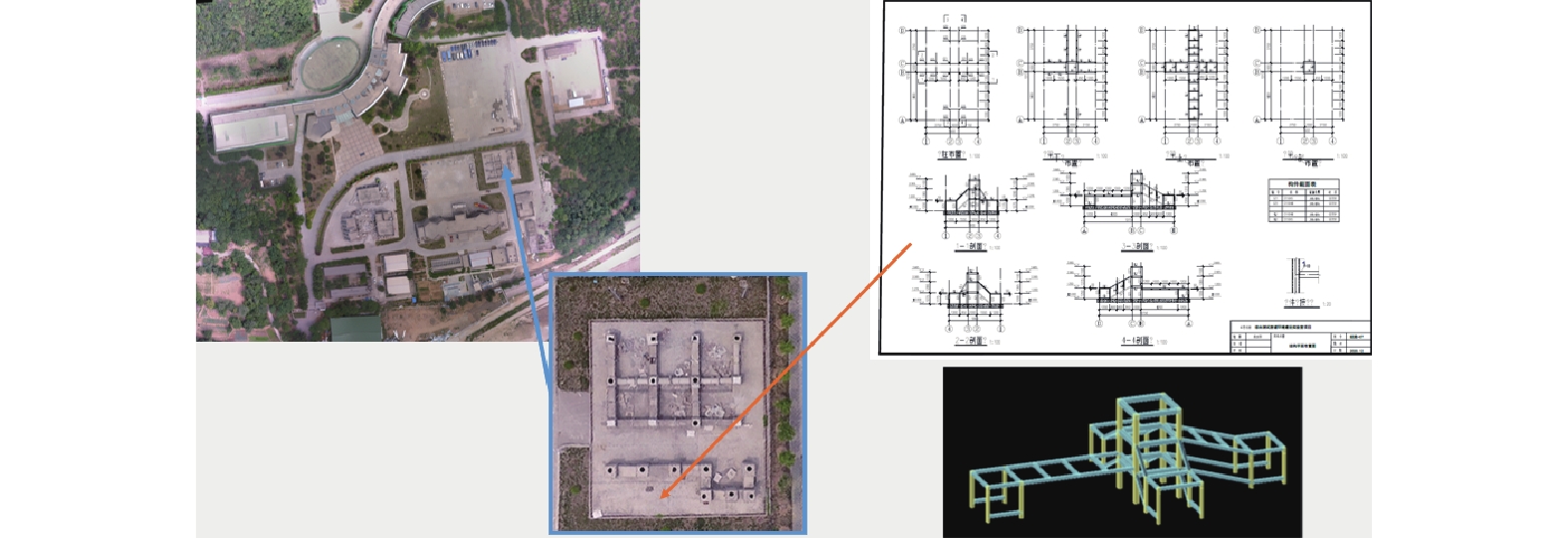
图 4 测试环境选址和结构设计
Figure 4. Site selection and structural design of the test environment
-
[1] 陈莉, 张涛, 李静等, 2017. 建筑结构地震安全性分析——汶川大地震遗址考察侧记. 中国应急救援, (1): 10—14. [2] 冯奇, 毛宁, 李仪, 2020. 穿墙雷达在城市反恐作战中的综合应用. 中国电子科学研究院学报, 15(11): 1090—1094 doi: 10.3969/j.issn.1673-5692.2020.11.011Feng Q. , Mao N. , Li Y. , 2020. Comprehensive application of through-the-wall radar in urban anti-terrorist operations. Journal of China Academy of Electronics and Information Technology, 15(11): 1090—1094. (in Chinese) doi: 10.3969/j.issn.1673-5692.2020.11.011 [3] 高博伟, 张涛, 陈莉等, 2018. 基于无人机摄影测量技术分析大型工程机械地震应急适用性. 防灾科技学院学报, 20(1): 9—16. doi: 10.3969/j.issn.1673-8047.2018.01.002Gao B. W. , Zhang T. , Chen L. , et al. , 2018. Analysis of the application of large engineering machinery in earthquake emergency based on UAV photograph measuring technique. Journal of Institute of Disaster Prevention, 20(1): 9—16. (in Chinese) doi: 10.3969/j.issn.1673-8047.2018.01.002 [4] 顾建华, 陈纬峰, 郝清源, 2003. 地震灾害现场救援搜索策略与搜索方法有关问题的讨论. 国际地震动态, (6): 6—12. doi: 10.3969/j.issn.0253-4975.2003.06.002Gu J. H. , Chen W. F. , Hao Q. Y. , 2003. Discussion on search strategies and methods of rescue operation on-the-spot of earthquake disasters. Recent Developments in World Seismology, (6): 6—12. (in Chinese) doi: 10.3969/j.issn.0253-4975.2003.06.002 [5] 李小军, 于爱勤, 甘朋霞等, 2008. 汶川8.0级地震北川县城区灾害调查与分析. 震灾防御技术, 3(4): 352—362.Li X. J. , Yu A. Q. , Gan P. X. , et al. , 2008. Survey and analysis of the disaster and engineering damage of Beichuan County seat in MS 8.0 Wenchuan earthquake. Technology for Earthquake Disaster Prevention, 3(4): 352—362. (in Chinese) [6] 刘晶波, 杨建国, 杜义欣等, 2006a. 国家地震紧急救援训练基地可控地震废墟设计(I)——结构地震破坏模式. 自然灾害学报, 15(2): 149—156.Liu J. B. , Yang J. G. , Du Y. X. , et al. , 2006a. Design of controllable seismic ruins for training base of emergency seismic rescue troops in China (I): destructive mode of structures in earthquake. Journal of Natural Disasters, 15(2): 149—156. (in Chinese) [7] 刘晶波, 杜义欣, 杨建国等, 2006b. 国家地震紧急救援训练基地可控地震废墟设计(II)——功能设计. 自然灾害学报, 15(4): 138—144.Liu J. B. , Du Y. X. , Yang J. G. , et al. , 2006b. Design of controllable seismic ruins for training base of emergency seismic rescue troops in China (II): functions design. Journal of Natural Disasters, 15(4): 138—144. (in Chinese) [8] 刘晶波, 刘阳冰, 贾群林, 2008. 国家地震紧急救援训练基地废墟训练场训练功能设计. 震灾防御技术, 3(1): 53—60. doi: 10.3969/j.issn.1673-5722.2008.01.007Liu J. B. , Liu Y. B. , Jia Q. L. , 2008. Functional design and realization of earthquake ruins structure for the earthquake rescue training base of China. Technology for Earthquake Disaster Prevention, 3(1): 53—60. (in Chinese) doi: 10.3969/j.issn.1673-5722.2008.01.007 [9] 刘晶晶, 宁宝坤, 吕瑞瑞等, 2017. 震后典型建筑物倒塌分类及救援特点分析. 震灾防御技术, 12(1): 220—229. doi: 10.11899/zzfy20170123Liu J. J. , Ning B. K. , Lv R. R. , et al. , 2017. Classification of typical building collapse and analysis of rescue characteristics after the earthquake. Technology for Earthquake Disaster Prevention, 12(1): 220—229. (in Chinese) doi: 10.11899/zzfy20170123 [10] 祁富贵, 吕昊, 梁福来等, 2016. 基于生物雷达的人体运动状态探测识别技术研究. 医疗卫生装备, 37(5)114—120, 124.Qi F. G. , Lv H. , Liang F. L. , et al. , 2016. Survey of human activity detection and recognition technology based on bio-radar. Chinese Medical Equipment Journal, 37(5): 114—120, 124. (in Chinese) [11] 孙学燕, 2014. 基于穿透式生命探测雷达描述人体运动轨迹. 中国新通信, 16(4): 31—32. doi: 10.3969/j.issn.1673-4866.2014.04.025 [12] 张涛, 尚红, 许建华等, 2012. 机器人技术在地震废墟搜索救援中的应用. 自然灾害学报, 21(5): 108—112.Zhang T. , Shang H. , Xu J. H. , et al. , 2012. Application of the robot technology in the search and rescue in earthquake ruins. Journal of Natural Disasters, 21(5): 108—112. (in Chinese) -

 下载:
下载:



 点击查看大图
点击查看大图

图(9)
计量
- 文章访问数: 175
- HTML全文浏览量: 75
- PDF下载量: 5
- 被引次数: 0
