
Integration Optimization and Effect Analysis of Earthquake Flow Observation Shield
-
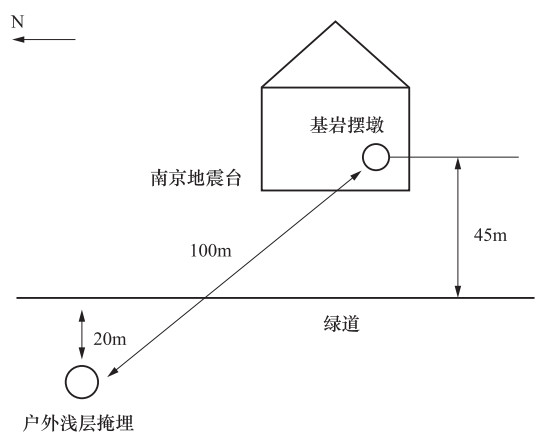
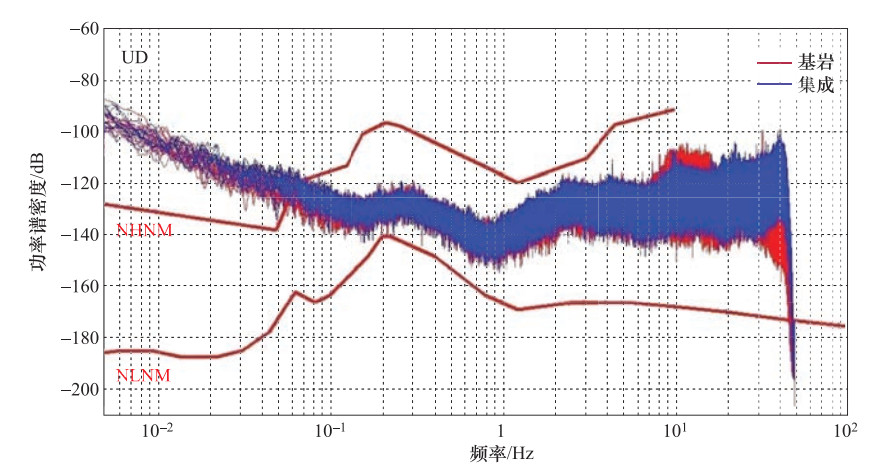
摘要: 为提升地震流动观测质量,适应恶劣条件下野外长期工作,研制集传感器、供电、通讯网络三大模块于一体的流动观测仪器整体防护罩。利用2套GL-PS2一体化短周期地震仪进行对比观测,一套安装于南京台室内基岩观测墩,另一套配备防护罩浅层掩埋于户外。结果表明新型研制的观测仪整体集成防护罩具有以下优点:①保温性能好,内部环境日温差小于3℃,月温度变化小于5℃。②防水性好,经历多次暴雨大雪天气后,防护罩内部干燥,无水滴或结露现象。③台基噪声略优于室内观测墩。④2台设备相关系数垂直向优于水平向,夜晚优于白天。⑤地震记录波形相关系数均在0.6以上,震级越大,相关性越高,且信噪比差距较小。Abstract: In order to improve the earthquake flow observation quality, a new seismograph shield is developed. Integrated optimization of sensor, power supply and communication network is able to achieve overall protection, which is adapted to long-term field work under severe conditions. Comparative observation with two GL-PS2 integrated short period seismograph has been done, one is installed on the bedrock observation pier of Nanjing seismic station, the other is shallowly buried out of doors with integrated optimization of shield. The results show that the newly developed observer Shield and integrated protection have the following advantages: ①good thermal insulation, internal environment daily temperature difference less than 3℃, monthly temperature change less than 5℃. ②good water resistance, and the interior of the protective cover is dry without water drop or condensation after heavy rain and heavy snow. ③the noise with integrated protection is slightly better than that of indoor observation pier. ④the correlation coefficient of the two is better in the vertical direction than in the horizontal direction, and better in the night than in the day. ⑤the correlation coefficients of the waveforms of seismic records are all above 0.6, the larger the magnitude, the higher the correlation, and the difference between the signal to noise ratio is small.
-

图 1 防护罩集成优化示意图
注: 1-保温层;2-防护罩;3-4G路由器;4-O型密封圈;5-太阳能板葛兰头;6-水平仪;7-覆土;8-GPS、GPRS、WIFI、葛兰头;9-太阳能控制器;10-锂电池;11-铝制隔板;12-地震仪;13-太阳能板
Figure 1. Integrated optimization schematic of shield
表 1 2套设备标定结果
Table 1. Calibration results of two seismographs
通道 周期/s(变化率/%) 阻尼(变化率/%) 电压灵敏度/V/(m·s-1)(变化率/%) 基岩_ud 2.1084(5.4185) 0.716816(1.3885) 998.34(0.17) 基岩_ew 2.0783(3.9128) 0.703904(0.4379) 1000.93(0.09) 基岩_ns 2.0415(2.0763) 0.702160(0.6846) 1004.08(0.41) 集成_ud 1.9972(0.1402) 0.691597(2.1786) 1001.66(0.17) 集成_ew 2.0229(1.1467) 0.704364(0.3728) 997.49(0.25) 集成_ns 2.0457(2.2867) 0.701876(0.7248) 999.39(0.06)  下载: 导出CSV
下载: 导出CSV
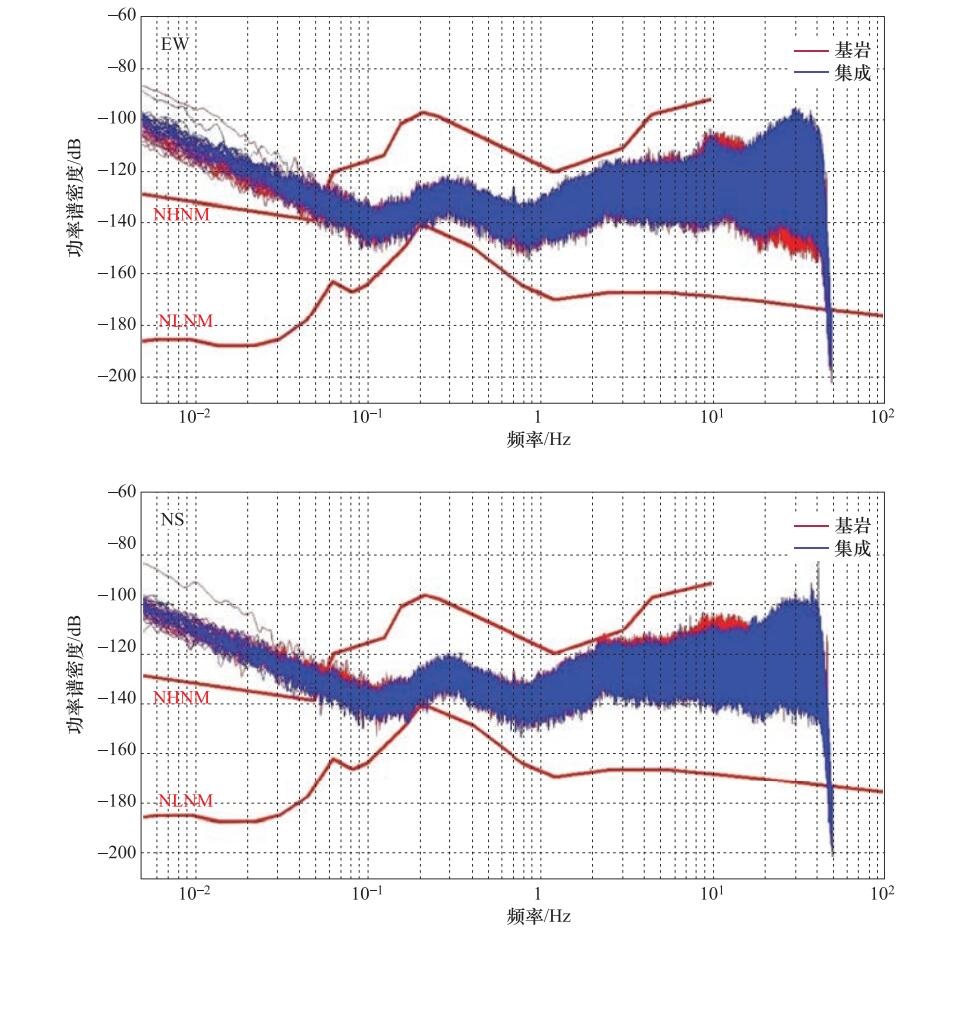
表 2 2台设备平均台基噪声
Table 2. Average noises of two seismographs
地震计 噪声平均值×10-8/m·s-1 平均噪声counts值(p-p) 噪声等级 基岩_ud 5.80101 1101 Ⅱ 基岩_ew 7.80126 1481 Ⅱ 基岩_ns 9.60356 1823 Ⅱ 集成_ud 5.08683 965 Ⅱ 集成_ew 7.43162 1411 Ⅱ 集成_ns 7.85839 1492 Ⅱ
下载: 导出CSV
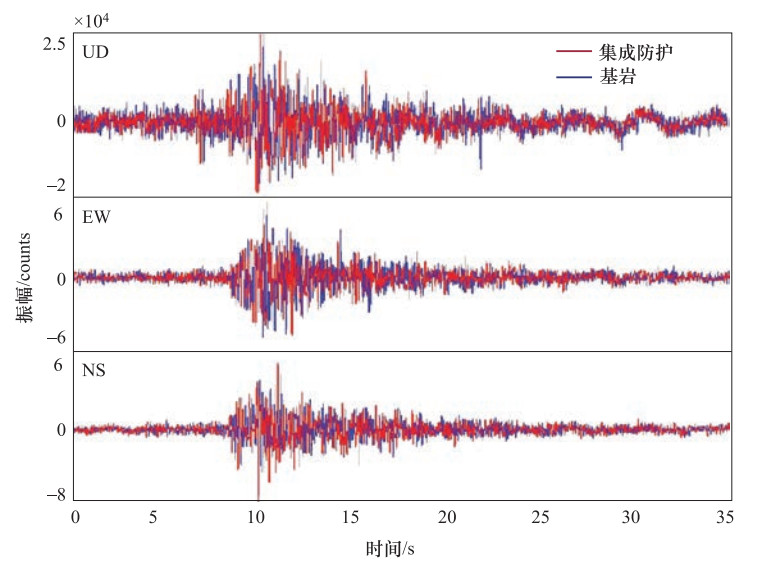
表 3 不同地震相关系数统计
Table 3. Statistics of correlation coefficient with different earthquakes
震级M 地震个数 相关系数R 0.5—0.6 0.6—0.7 0.7—0.8 0.8—0.9 0.9以上 1.0—2.0 UD — 2 1 — — EW 1 2 — — — NS — 3 — — — 2.0—3.0 UD — 1 6 — — EW — 3 4 — — NS — 2 5 — — 3.0—4.0 UD — 2 5 2 — EW — 4 4 1 — NS — 3 5 1 — 4.0—5.0 UD — — 3 7 — EW — — 5 5 — NS — — 6 4 — 5.0—6.0 UD — — — 5 — EW — — 2 3 — NS — — 2 3 — 6.0—7.0 UD — — — — 3 EW — — — 2 1 NS — — — 2 1 7.0以上 UD — — — — 2 EW — — — — 2 NS — — — 1 1
下载: 导出CSV
表 4 地震波形信噪比偏差统计
Table 4. Deviation statistics of signal to noise ratio of seismic waveform
震级M 地震个数 SNR1-SNR2 -0.5—0 0—0.5 0.5—1 1—1.5 1.5以上 1.0—2.0 UD 3 — — — — EW 2 1 — — — NS 3 — — — — 2.0—3.0 UD 4 2 1 — — EW 3 4 — — — NS 4 3 — — — 3.0—4.0 UD — 2 5 2 — EW — 5 4 — — NS — 6 3 — — 4.0—5.0 UD — 4 5 1 EW — 1 5 4 — NS — 3 3 4 — 5.0—6.0 UD — 2 3 — EW — 1 2 3 — NS — 2 1 2 — 6.0—7.0 UD — — — 3 — EW — — 1 2 — NS — — 1 2 — 7.0以上 UD — — — 2 1 EW — — — 3 — NS — — — 2 —
下载: 导出CSV
-
陈颙, 周华伟, 葛洪魁, 2005. 华北地震台阵探测计划. 大地测量与地球动力学, 25(4): 1-5. https://www.cnki.com.cn/Article/CJFDTOTAL-DKXB200504000.htm 葛洪魁, 陈海潮, 欧阳飚等, 2013. 流动地震观测背景噪声的台基响应. 地球物理学报, 56(3): 857-868. https://www.cnki.com.cn/Article/CJFDTOTAL-DQWX201303016.htm 花鑫升, 石金虎, 谭雅丽等, 2018. 浅层地震勘探资料揭示汤东断裂特征. 震灾防御技术, 13(2): 276-283. http://zzfy.eq-j.cn/zzfyjs/ch/reader/view_abstract.aspx?flag=1&file_no=20180203&journal_id=zzfyjs 姜旭东, 杨建思, 徐志强等, 2009. 应对巨大地震的应急流动观测系统. 地震地磁观测与研究, 30(5): 59-65. https://www.cnki.com.cn/Article/CJFDTOTAL-DZGJ200905010.htm 李世成, 崔建文, 张潜等, 2011.2009年姚安Ms6.0强震动应急观测. 地震研究, 34(3): 322-330. https://www.cnki.com.cn/Article/CJFDTOTAL-DKXB201102004.htm 李世成, 林国良, 崔建文, 2017. 云南强震动流动观测发展及相关问题讨论. 地震研究, 40(4): 629-637. doi: 10.3969/j.issn.1000-0666.2017.04.015 任叶飞, 温瑞智, 周宝峰, 2011. 强震动记录编目——以汶川余震流动观测记录为例. 震灾防御技术, 6(4): 406-415. doi: 10.3969/j.issn.1673-5722.2011.04.006 孙宏志, 2016. 地震计智能恒温系统的设计与实现. 地震工程学报, 38(6): 1004-1009. https://www.cnki.com.cn/Article/CJFDTOTAL-ZBDZ201606024.htm 孙路强, 柳艳丽, 刘文兵等, 2014. 沉积层地震观测噪声的对比试验. 震灾防御技术, 9(4): 932-936. http://zzfy.eq-j.cn/zzfyjs/ch/reader/view_abstract.aspx?flag=1&file_no=20140422&journal_id=zzfyjs 王恒知, 俞言祥, 何斌等, 2018. 高邮-宝应4.9级地震地面运动特征分析. 地震地质, 40(6): 1349-1361. https://www.cnki.com.cn/Article/CJFDTOTAL-DZDZ201806011.htm 温瑞智, 周正华, 李小军等, 2009. 汶川Ms8.0地震的强余震流动观测. 地震学报, 31(2): 219-225. https://www.cnki.com.cn/Article/CJFDTOTAL-DLXB201910010.htm 杨建思, 2008. 汶川地震所见的零星感受与启示. 国际地震动态, (7): 40-45. doi: 10.3969/j.issn.0253-4975.2008.07.007 张云鹏, 李孝宾, 王伟涛等, 2017. 云南宾川地震信号发射台的流动观测数据服务系统及数据质量评估. 地震研究, 40(4): 525-533. doi: 10.3969/j.issn.1000-0666.2017.04.003 郅红魁, 程楠, 郭慧等, 2019. 地震计恒温低湿智能监控仪研制. 地震地磁观测与研究, 40(1): 128-133. https://www.cnki.com.cn/Article/CJFDTOTAL-DZGJ201901019.htm Burdick S., Li C., Martynov V., et al., 2008. Upper mantle heterogeneity beneath North America from travel time tomography with global and USArray transportable array data. Seismological Research Letters, 79(3): 384-392. doi: 10.1785/gssrl.79.3.384 Yang Y. J., Ritzwoller M. H., Lin F. C., et al., 2008. Structure of the crust and uppermost mantle beneath the western United States revealed by ambient noise and earthquake tomography. Journal of Geophysical Research: Solid Earth, 130(B12): B12310. doi: 10.1029/2008JB005833/full -




 点击查看大图
点击查看大图
计量
- 文章访问数: 199
- HTML全文浏览量: 64
- PDF下载量: 5
- 被引次数: 0
