
Parametric Study on the Residual Displacement Spectra
-
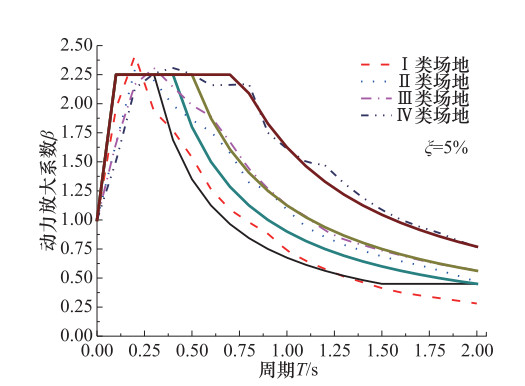
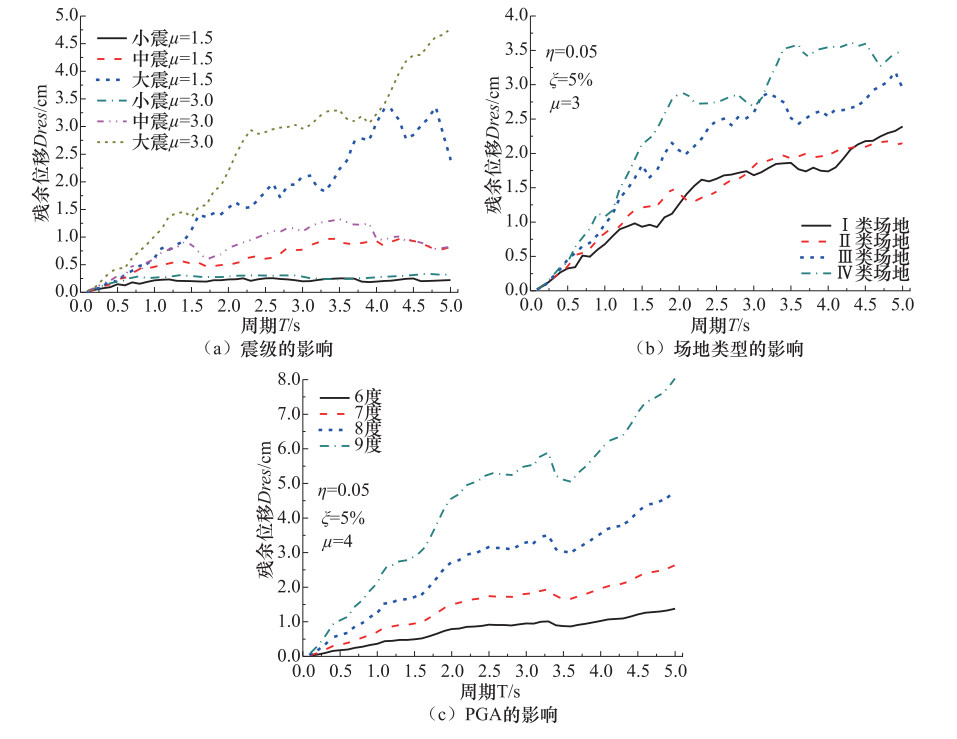
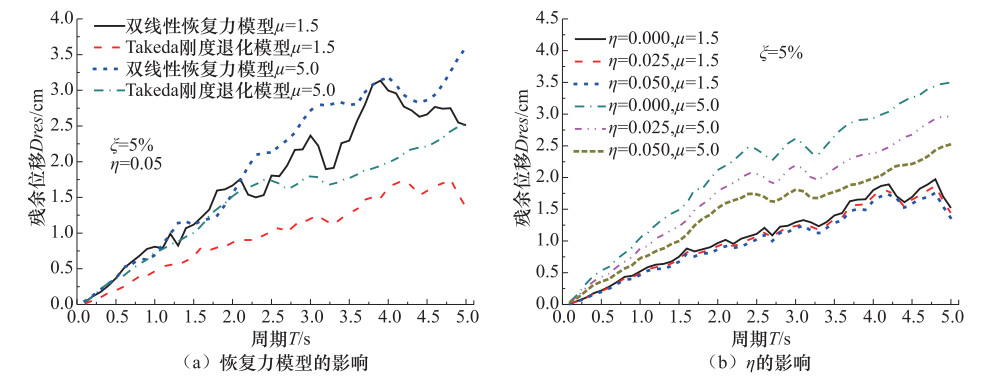
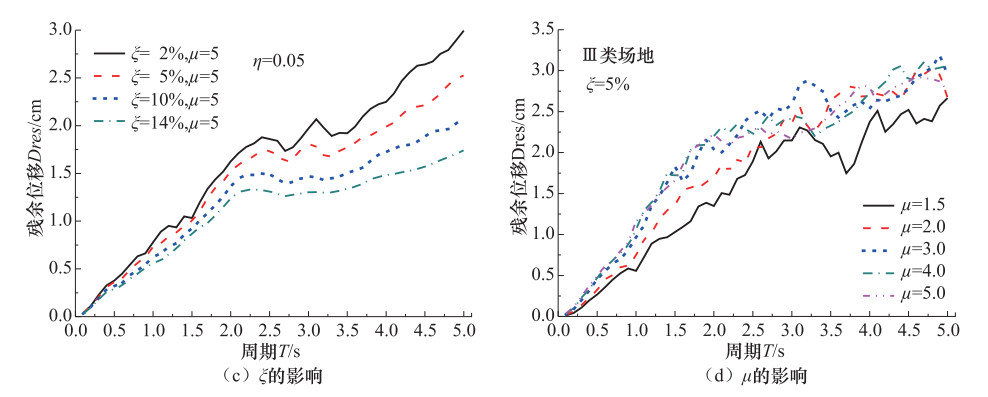
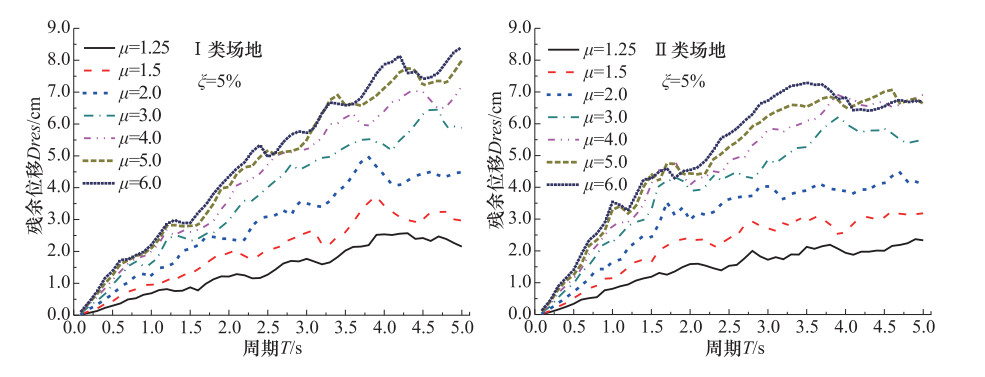
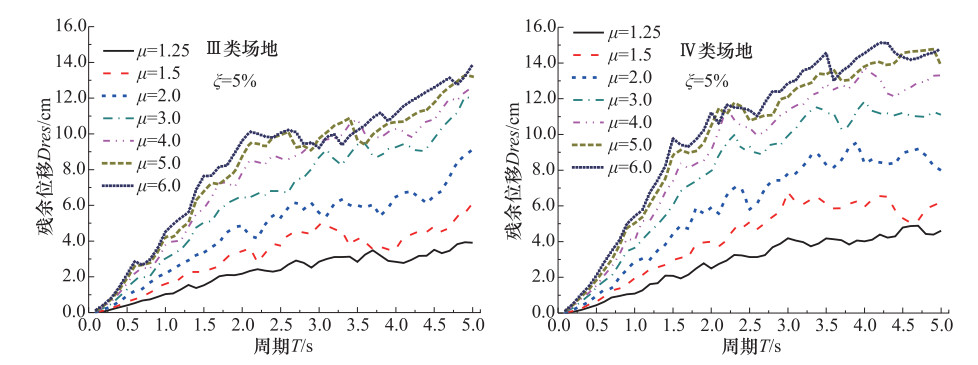
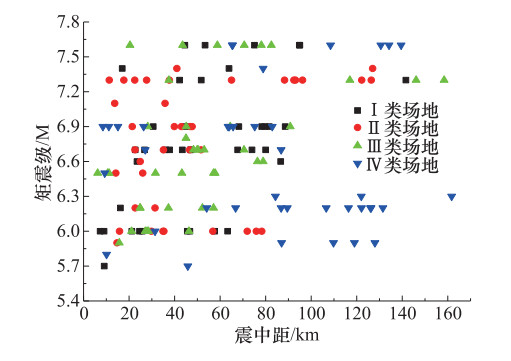
摘要: 从PEER强震数据库中选取4类场地的320条地震动记录作为输入,采用BISPEC程序对非线性单自由度(SDOF)体系(周期T=0.05—5s)进行非线性时程分析,得到相应的残余位移反应谱(Dres),进而研究地震动特性和恢复力模型动力参数对Dres的影响,得到如下结论:①Dres谱值随震级和PGA的增加而增大;其他设防烈度的Dres可由PGA其他与PGA基准之比调整基准烈度的Dres得到。②场地土较硬时,场地类型对Dres的影响较小;场地土较软时,Dres谱值随土质的变软而增大。③当位移延性比μ较小时,屈服后刚度比η对Dres的影响可忽略;但当μ较大时,Dres谱值随η的增加而减小。另外,Dres谱值还随阻尼比ξ的增加而减小。④随着T或μ的增大,Dres谱值均呈递增趋势;但当μ>3后,μ对Dres谱值的影响有所下降。Abstract: This study obtains the corresponding residual displacement response spectra (Ders) by selecting 320 strong motion records from the PEER as input and adopting the BISPEC sofeware to carry out the nonlinear time-history analysis on the nonlinear Single Degree of Freedom (SDOF) system (period T=0.05~5s),and then study the impact of ground motion characteristics and dynamic parameters of the restoring force model. Some results are as follow:1) The values of the Dres increase with a rise in the earthquake magnitude and PGA. The Dres under other design intensities can be obtained by using the ratio of PGAother to PGAstandard to adjust Dres under the standard design intensity. 2) When the soil condition of the site is hard,the effects of the site on Dres are minor; when the soil condition of the site is soft,the values of the Dres increase with the softening of the soil condition of site. 3) When the displacement ductility (μ) is smaller than μ,the effects of the post-yield stiffness ratio (η) on the Dres is negligible,but when μ is larger,the values of the Dres decrease with an increase in η. Meanwhile,the values of the Dres also decrease as the damping ratio (ξ) increases. 4) The values of the Dres show an increasing trend with an increase in the T or μ,but the effects of μ on the Dres decrease when μ> 3.
-
杜修力, 许紫刚, 袁雪纯等, 2018.地震动峰值位移和峰值速度对地下结构地震反应的影响.震灾防御技术, 13(2):293-303. http://zzfy.eq-j.cn/zzfyjs/ch/reader/view_abstract.aspx?flag=1&file_no=20180205&journal_id=zzfyjs 李芳宝, 朱晞, 2007.近场具有脉冲地层运动的单自由度双线性结构残余位移比谱.中国铁道科学, 28(3):49-55. doi: 10.3321/j.issn:1001-4632.2007.03.010 李平, 田兆阳, 肖瑞杰等, 2017.基于三轴试验的软土震陷简化计算方法研究.震灾防御技术, 12(1):145-156. http://zzfy.eq-j.cn/zzfyjs/ch/reader/view_abstract.aspx?flag=1&file_no=20170115&journal_id=zzfyjs 李宇, 2010.考虑残余位移和土-结构相互作用的桥梁结构基于性能的抗震设计及评估.北京: 北京交通大学. http://cdmd.cnki.com.cn/Article/CDMD-10613-1017298616.htm 中华人民共和国交通运输部, 2008.JTG/T B02-01-2008公路桥梁抗震设计细则.北京: 人民交通出版社. 中华人民共和国铁道部, 2006.GB 50111-2006铁路工程抗震设计规范.北京: 中国计划出版. 周锡元, 王国权, 杨润林等, 2001.1999年9月21日台湾集集地震中不同场地上峰值加速度的衰减特征.大型复杂结构的关键科学问题及设计理论研究论文集. Japan Road Association, 1996. Design specifications of highway bridges, Part V: Seismic design. Tokyo, Japan. Kawashima K., MacRae G. A., Hoshikuma J., et al., 1998. Residual displacement response spectrum. Journal of Structural Engineering, 124(5):523-530. doi: 10.1061/(ASCE)0733-9445(1998)124:5(523) MacRae G. A., Kawashima K., 1997. Post-earthquake residual displacements of bilinear oscillators. Earthquake Engineering and Structural Dynamics, 26(77):701-716. http://cn.bing.com/academic/profile?id=28c5e7353ea2f765dbdda2af0bf0767f&encoded=0&v=paper_preview&mkt=zh-cn Mahin S. A., Bertero V. V., 1981. An evaluation of inelastic seismic response spectra. Journal of the Structural Division, 107(9):1777-1795. Mahmoud M.Hachem. BISPEC: Interactive Software for the Computation of Unidirectional and Bidirectional Nonlinear Earthquake Spectra[J]. Structures Congress, 2004: 1-12 Zatar W. A., Mutsuyoshi H., 2000. Reduced residual displacements of partially prestressed concrete bridge piers. 12th World Conference on Earthquake Engineering, Auckland, New Zealand. -

 下载:
下载:
 点击查看大图
点击查看大图
图(7) / 表(1)
计量
- 文章访问数: 285
- HTML全文浏览量: 79
- PDF下载量: 4
- 被引次数: 0
