
Design and Application of Digital Force Balanced Accelerometer
-
摘要: 在传统模拟式力平衡加速度传感器技术的基础上,通过改进传感器机械结构、内嵌高精度采集器等方法,设计了1款数字化力平衡加速度传感器。针对传感器中三通道模数转换要求完全同步、高分辨率、高采样率等技术难点,本文选用高精度ADS1294模数转换器,以同1个驱动信号完成三通道同步模数转换,实现低干扰、高分辨率的模数转换;采用高速ARM微处理器对模数转换数据进行大容量数据存储、高速数据通讯、数据处理、波形显示和电源管理;采用高精度线性电源芯片作为可开关控制的高精度电源,实现仪器整机低功耗管理。该数字化力平衡加速度传感器实现了大动态测量范围、三通道同步数据转换、高达1000Hz的采样率,且具有网络通讯接口等功能。Abstract: A new digital force balanced accelerometer (DFBA) with multiple interfaces was designed in this paper, in which a integrated and orthogonal to each other three-component mechanical base was designed. The magnetic field intensity and mass were changed in the mechanical base. A high precision analog-to-digital circuit board and a high-speed ARM board were embedded in this DFBA. The high precision analog-to-digital circuit board was designed with three 24 bit resolution △-Σ analog-to-digital convertors ADS1294. So it is capable of three channels synchronous analog-to-digital conversion. Five kinds of linearity power supply chips were selected to design high-precision analog powers. Which allows three-channel AD conversion achieved 21.6bit effective resolution. The high-speed ARM board with a 4-core 1.4GHz×4 high speed CPU and multiple interfaces was used in this digital force balanced accelerometer. This DFBA can provides large dynamic range, three channels synchronous analog-to-digital conversion with low power consumption, up to 1000Hz sampling rate, USB interface, cable network and so on.
-
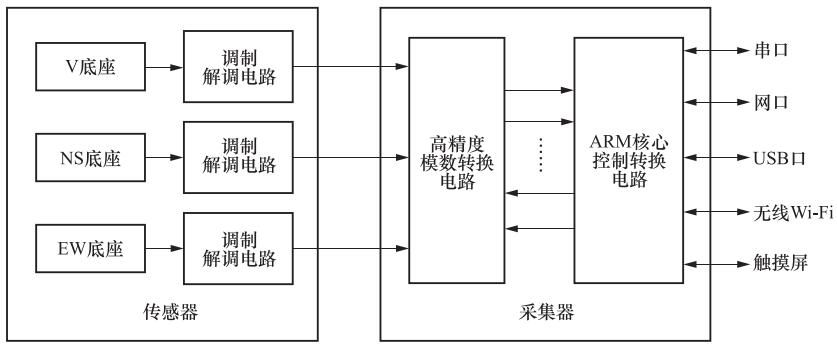
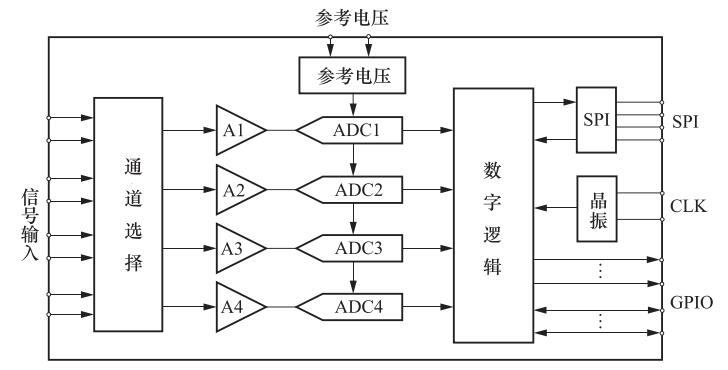
图 1 数字化加速度传感器原理框图
Figure 1. Functional block diagram of digital force balanced accelerometer
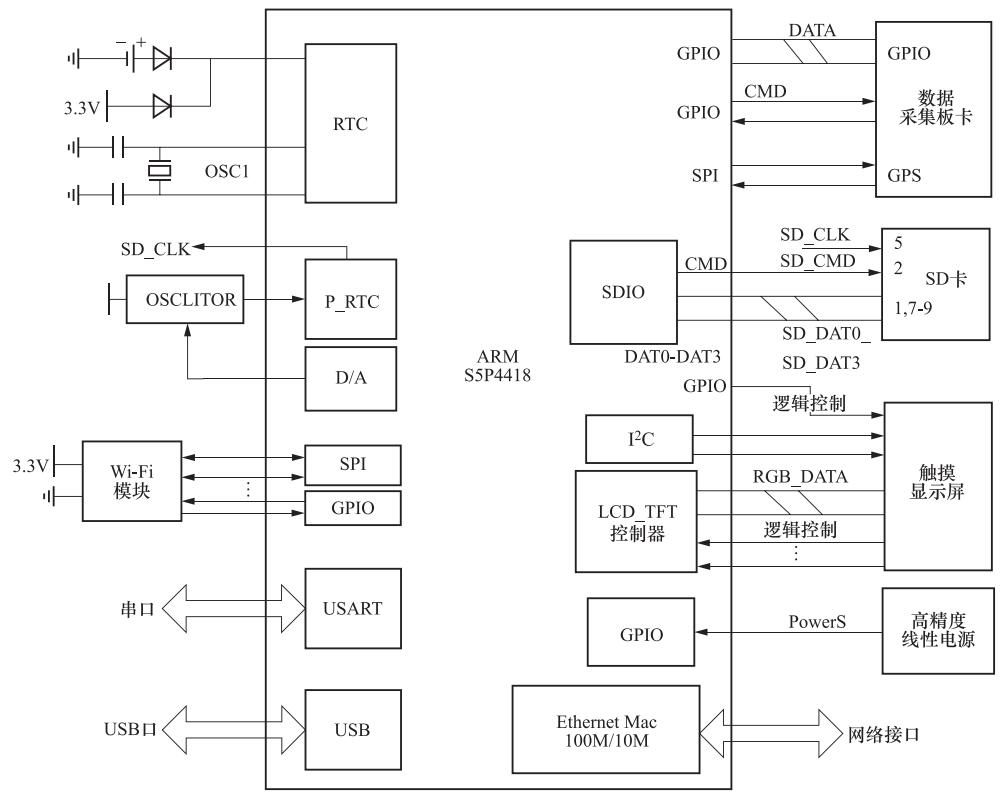
图 5 S5P4418型ARM核心板原理图
Figure 5. Diagram showing principle of S5P4418 ARM circuit board

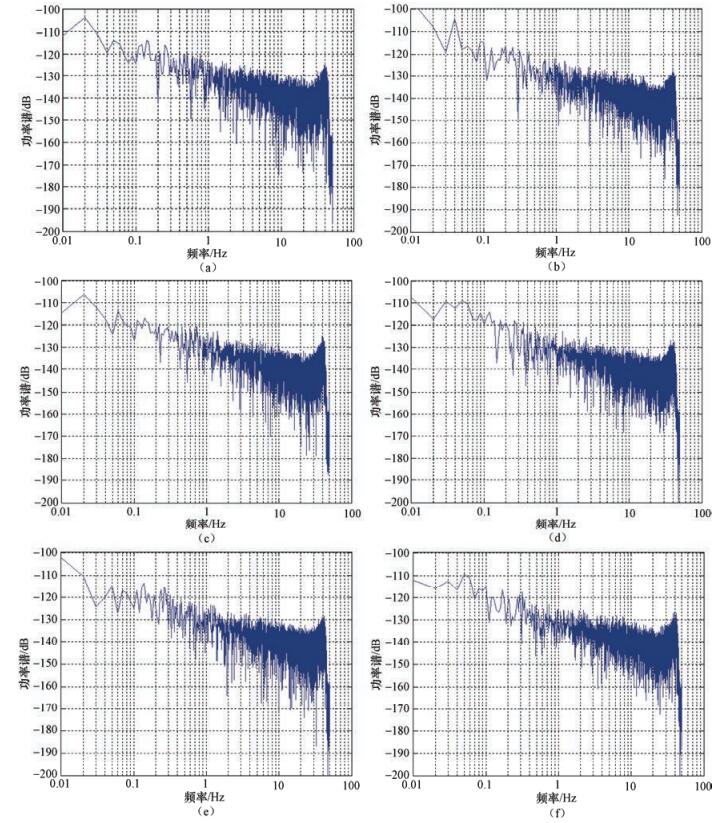
图 6 北京白家疃地震台强震观测噪声波形曲线
Figure 6. Strong motion noise waves observed from Baijiatuan station
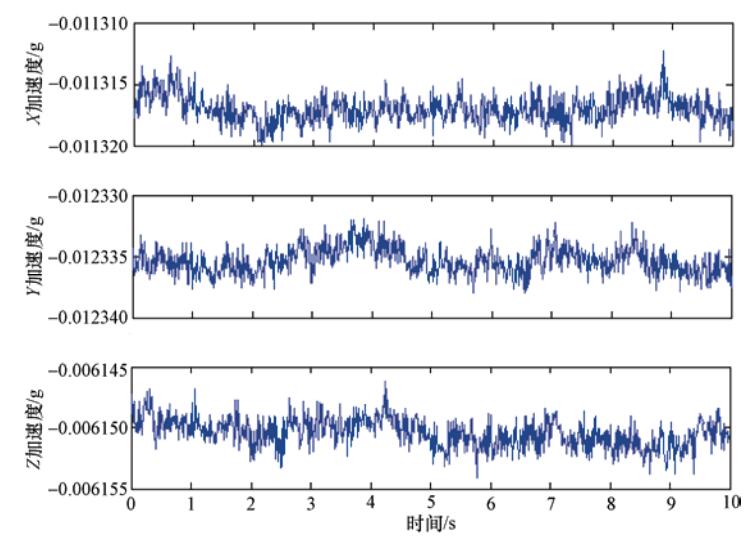
图 7 安徽金寨地震台强震观测噪声波形曲线
Figure 7. Strong motion noise waves observed from Jinzhai station

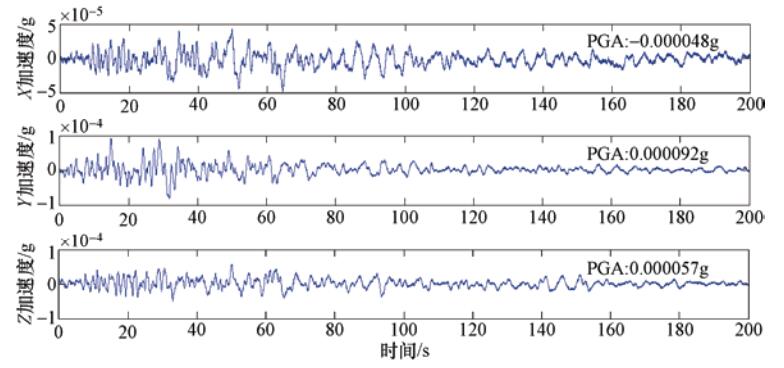
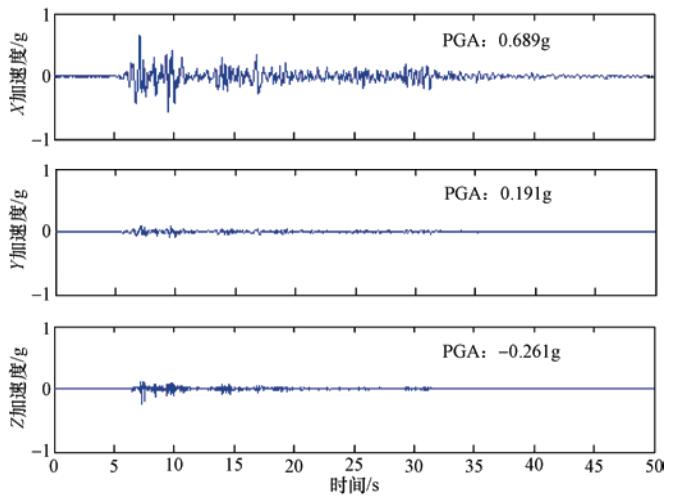
图 8 北京白家疃地震台强震观测噪声波形曲线
Figure 8. Strong motion noise waves observed from Baijiatuan station

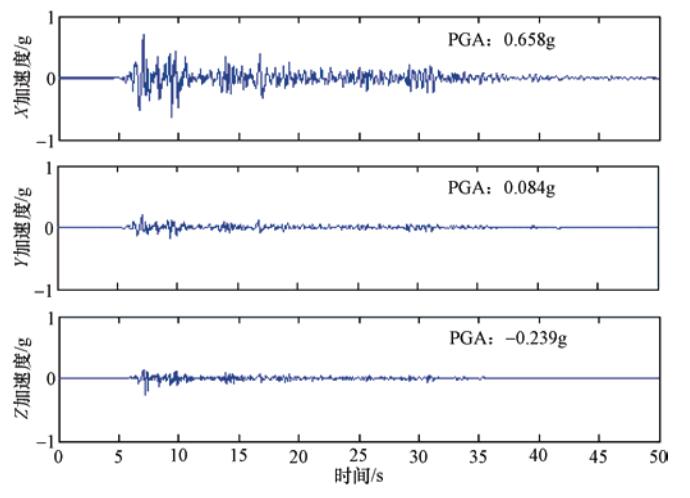
图 9 安徽金寨地震台强震观测噪声波形曲线
Figure 9. Strong motion noise waves observed from Jinzhai station
表 1 加速度传感器幅频特性标定数据
Table 1. Calibration data for amplitude and frequency characteristics of accelerometer
频率/Hz 输出灵敏度/V·g-1 1 2.549 5 2.548 10 2.541 20 2.541 40 2.432 60 2.348 80 2.369 100 2.348 110 2.329 120 2.366 140 2.382 160 2.330 180 2.124 200 1.748 220 1.337  下载: 导出CSV
下载: 导出CSV
表 2 传感器噪声及动态范围
Table 2. Noise result and dynamic range of the force balanced accelerometer
计算项 北京市白家疃地震台 安徽省金寨县地震台 东西向 南北向 垂直向 东西向 南北向 垂直向 噪声值RMS/μg 1.2051 1.1260 0.7235 1.3720 1.5805 1.2861 动态范围/dB 130.42 131.01 134.85 129.29 128.01 129.86
下载: 导出CSV
-
李彩华, 李小军, 滕云田, 2014.差动输出型力平衡加速度传感器设计与噪声测试.地震地磁观测与研究, 35(1-2):219-223. http://d.old.wanfangdata.com.cn/Periodical/dzdcgcyyj201401041 吴海超, 2013.具有WiFi无线监控功能的宽频带地震记录器样机研制.长春: 吉林大学. http://cdmd.cnki.com.cn/Article/CDMD-10183-1013195441.htm Hu X. X., Teng Y. T., Wang X. Z., et al., 2014. The study on 24 Bits ADC's acquisition dynamic range extension method. Applied Mechanics and Materials, 666:98-103. doi: 10.4028/www.scientific.net/AMM.666 -

 点击查看大图
点击查看大图
计量
- 文章访问数: 128
- HTML全文浏览量: 70
- PDF下载量: 11
- 被引次数: 0
