
Technical Application of the Tethered UAV Relay System in Earthquake Emergency Site
-
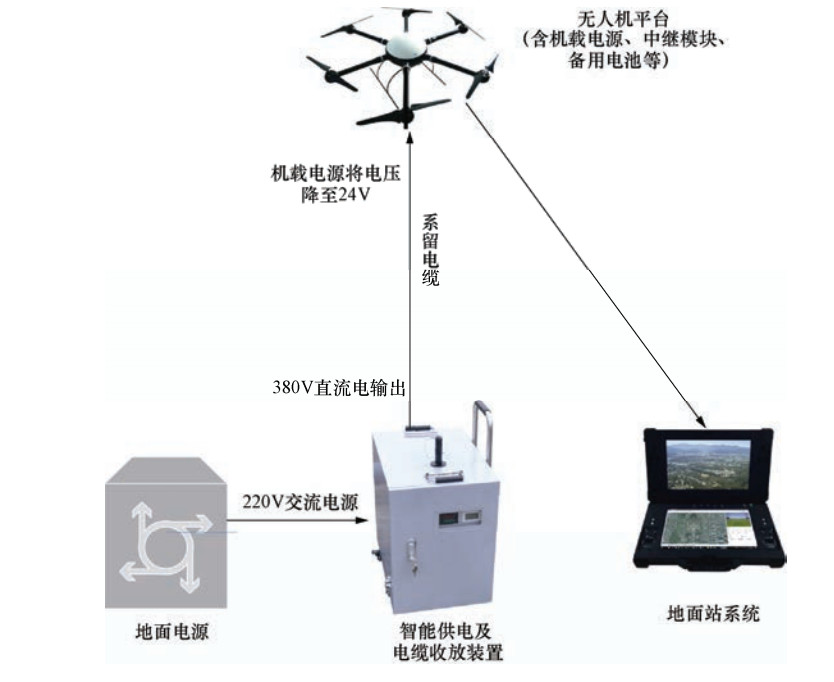
摘要: 在地震现场应急通信中,为满足无线图传系统等通信设备在复杂地形进行大范围和远距离通信作业的需求,提出利用系留式无人机中继通信系统保障无线电(超短波)的远距离传输。目前,对该系统的研究还处于理论分析和试验阶段,尚未在地震应急中得到大范围的推广应用。本研究利用多次试验的数据,分析验证系留式无人机供电系统的可行性及实用性,定量计算中继通信系统的升空效益,并形成一套完整的、可操作性强的系统实施方案。在城区、郊区以及起伏较低的山地、丘陵等地区,实现了移动图传系统在距离通信车5—10km范围内稳定、实时、快速的数据传输。Abstract: In the emergency communications of earthquake site, wireless mapping system equipment needs to adapt to complex terrain and long distance communication operations. The tethered UAV Relay system is currently in the theoretical analysis and experimental stage, and has not yet been a wide range of practical promotion in the earthquake emergency site. Based on multiple experimental studies, we analyzed and verified its feasibility and practicability. At the same time, we quantitatively estimated its ability raising the height increases the effect. The results of this experimental study can be used to provide a reliable basis and pre-prepared in the application of the system in the earthquake site. Meanwhile, it can used to improve the existing earthquake site emergency communication system.
-

图 5 无人机中继通信系统临界点测试路线及点位分布示意图
Figure 5. The route and critical distribution points of the tethered UAV relay system
表 1 系留式无人机供电系统主要技术指标
Table 1. The technical configurations of the tethered UAV system
项目 指标 无人机型号 KWT-X6L六旋翼 有效载荷 ≥7kg 起飞重量 11.4kg 续航时间设计 8h 系留线缆总长度 100m 电压 地面电源AC-220V 系留线缆光纤特性 单模光纤10Gb/s 系留线缆重量 3.5kg/100m 系留线缆抗拉力 >150kg 线缆收放方式 电子智能控制  下载: 导出CSV
下载: 导出CSV
表 2 中继通信集成系统主要技术指标
Table 2. The technical configurations of aerial relay system
项目 指标 设计重量 <0.5kg 尺寸 109mm×145mm×15mm 发射频率 315—345MHz 射频带宽 2MHz(标清);4MHz(高清) 输入频率 597—614MHz 接收射频带宽 1.5MHz,2MHz(标清);4MHz(高清) 接收灵敏度 ≤-98dBm(4MHz)
≤-102dBm(2MHz)设计传输距离 ≥10km
下载: 导出CSV
表 3 系留式无人机供电系统测试结果
Table 3. Test results of the tethered UAV system
项目 试飞次数 不间断悬停时间/min 供电方式 图传频率/MHz 悬停高度/m 线缆收放 线缆抗拉能力 地面站接收效果 指标 2 >30 地面电源AC-220V 595 <91 正常 3级风正常 稳定
下载: 导出CSV
表 4 系留式无人机中继通信系统的升空效益测试结果
Table 4. Test results of the UAV relay system
测试 单兵与指挥车距离/km 无人机升空高度/m 信号强度/dBi 理论通信距离/km 极限通信距离/km 1 2.0 45 -80 26 3 2.7 45 -52 26 3 2 3.5 60 -52 32 8 3.5 60 -59 32 8 4.8 90 -60 37 14 5.6 90 -59 37 14 3 8.2 100 -58 40 16 不使用中继 1.1 -18 8.7 <3
下载: 导出CSV
表 5 无人机中继通信系统临界点测试结果
Table 5. Test results of critical points of the UAV relay system
点位 海拔/m 单兵与指挥车距离/km 环境描述 备注 ① 123 1.3 城区(高层建筑) 单兵通信临界点 ② 96 5.1 城区(高层建筑) 无人机中继通信临界点 ③ 104 4.7 城区(高层建筑、立交桥等) 无人机中继通信临界点 ④ 152 1.0 低丘陵区(高层建筑) 单兵通信临界点 ⑤ 174 5.3 低丘陵区(高层建筑) 无人机中继通信临界点 ⑥ 181 7.4 低丘陵地区(有低山、低层建筑) 无人机中继通信临界点 注:无人机飞行高度100m,单兵发射频率595MHz,指挥车接收频率320MHz,风力4级左右。
下载: 导出CSV
-
邓飞, 窦爱霞, 袁小祥, 2017.轻小型无人机在房屋建筑结构类型调查中的应用.震灾防御技术, 12(4):786-796. http://zzfy.eq-j.cn/zzfyjs/ch/reader/view_abstract.aspx?flag=1&file_no=20170407&journal_id=zzfyjs 姜立新, 吴天安, 刘在涛等, 2004.地震现场应急指挥技术系统的结构与设计.地震, 24(3):35-41. http://d.old.wanfangdata.com.cn/Periodical/diz200403006 李妍文, 霍帅珂, 陈伟桢等, 2014.基于Google Earth的无人机中继布局优化软件.现代电子技术, 37(4):60-63, 69. doi: 10.3969/j.issn.1004-373X.2014.04.017 李永强, 曹刻, 赵恒等, 2007.云南地震应急卫星通讯技术的系统集成与应用.地震研究, 30(1):93-98. doi: 10.3969/j.issn.1000-0666.2007.01.018 刘磊, 李景峰, 王烁, 2016.系留式无人机载通信系统.通讯世界, (14):53-54. doi: 10.3969/j.issn.1006-4222.2016.14.046 刘利强, 韩斐, 2008.一种基于空中平台中继的通信系统的设计.计算机与网络, 34(16):37-39. doi: 10.3969/j.issn.1008-1739.2008.16.024 帅向华, 姜立新, 刘钦等, 2009.地震应急指挥技术系统设计与实现.测绘通报, (7):38-41, 54. http://d.old.wanfangdata.com.cn/Periodical/zzfyjs201102011 王东明, 王晓青, 黄宏生等, 2007.地震现场应急指挥及其标准化研究.自然灾害学报, 16(4):143-148. doi: 10.3969/j.issn.1004-4574.2007.04.025 王海涛, 2011.应急通信发展现状和技术手段分析.电力系统通信, 32(220):1-6. http://d.old.wanfangdata.com.cn/Periodical/dlxttx201102001 杨乐, 曾薇, 谭颖, 2012.地震应急卫星通信系统的设计与应用.震灾防御技术, 7(1):100-109. doi: 10.3969/j.issn.1673-5722.2012.01.012 杨天青, 帅向华, 2010.国家地震应急指挥技术系统建设中的关键技术及应用.震灾防御技术, 5(2):208-214. doi: 10.3969/j.issn.1673-5722.2010.02.007 殷素杰, 王迎栋, 赵彦芬, 2013.空中中继通信关键技术浅议.计算机与网络, 39(1):69-71. doi: 10.3969/j.issn.1008-1739.2013.01.049 袁全盛, 胡永江, 王长龙, 2015.无人机中继通信的关键技术与发展趋势.飞航导弹, (10):26-29. http://d.old.wanfangdata.com.cn/Periodical/fhdd201510006 张毓丰, 邓民宪, 2005.地震现场应急救援的通信系统设计.灾害学, 20(4):111-115. doi: 10.3969/j.issn.1000-811X.2005.04.024 周兴霞, 程多祥, 赵桢等, 2016.中继通信技术在无人机应急测绘保障中的应用.测绘通报, (11):47-50. http://d.old.wanfangdata.com.cn/Periodical/chtb201611013 -


 点击查看大图
点击查看大图
计量
- 文章访问数: 160
- HTML全文浏览量: 39
- PDF下载量: 9
- 被引次数: 0
