
Application of the UVA Oblique Photograghy Technique in the Field of Ludian Earthquake, Yunnan
-
摘要: 本文首先介绍了利用六旋翼无人机倾斜摄影系统和动力三角翼倾斜摄影系统在云南鲁甸地震现场开展倾斜摄影数据采集、三维建模的相关工作,利用建立的三维模型,分别对灾区房屋震害、滑坡、滚石、堰塞湖地震地质灾害进行了系统的分析研究。相关研究表明:倾斜摄影技术可以表现地震灾害场景和具体灾害特征,对遥感在地震灾情精细化分析及了解灾区建筑物的布局、破坏程度和恢复重建建筑现状方面具有重要的意义。该项工作是地震领域初次利用倾斜摄影技术开展的相关研究,对于进一步深入研究倾斜摄影新技术在地震灾害领域和其他相关领域的工作具有很好的借鉴作用。Abstract: In this paper we describe the use of six rotor UVA oblique photography system and power of delta wing oblique photography system, and carry out related work oblique photography data acquisition, 3D modeling of the Ludian earthquake in Yunnan. Based on the 3D model, earthquake disaster housing and seismic geological disasters of landslides, rockfall and earthquake-induced lake are analyzed. Our study has a good reference for further research of new technology in earthquake disaster tilt photography and other related works.
-
Key words:
- Yunnan Ludian earthquake /
- Oblique photography /
- Earthquake disaster
-
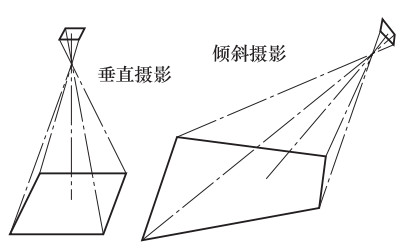
图 1 中心投影与倾斜投影原理对比图
Figure 1. Comparison of principles between central projection and oblique projection

图 6 从另一角度展示滚石击中房屋,滑坡土方掩埋房屋
Figure 6. The building is destroyed by the landslide and rockfall from different view angle

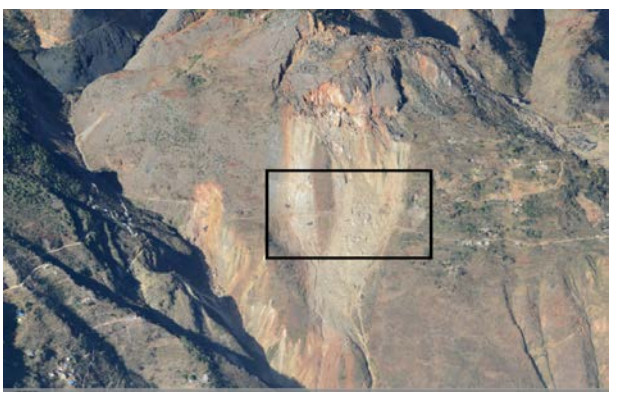
图 7 滑坡掩埋房屋、滚石击中房屋(放大)
Figure 7. The building is destroyed by the landslide and rockfall(enlarged partial detail)
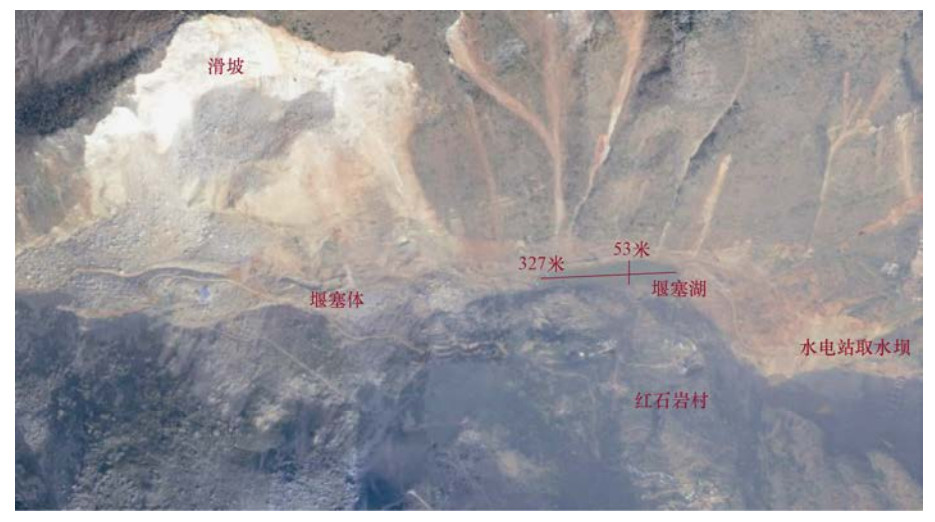
图 11 动力三角翼倾斜摄影的红石岩堰塞湖及其周边影像
Figure 11. The oblique photography of Hongshiyan earthquake-induced lake and its surrounding imagery by the power delta wing aircraft
表 1 无人机基本参数
Table 1. The basic parameters of UVA
飞行器性能 技术参数 总重量 <8kg(含两块电池) 飞行升限 1500m 载重与续航时间 载重2.5kg,续航时间≥30min 悬停精度 垂直方向±1m,水平方向±2m 最大倾斜角度 35° 最大升降速度、平飞速度 最大升降速度6m/s;最大平飞速度10m/s 巡航速度 ≥6m/s 平均维修时间 ≤30min 工作效率 0.5km2/架次  下载: 导出CSV
下载: 导出CSV
表 2 云台和相机基本参数
Table 2. The basic parameters of the cloud platform and the camera
云台性能 技术参数 尺寸 210mm×265mm 重量 2.1kg CCD数量 5个 CCD尺寸 13.2mm×8.8mm 最小曝光间隔 2s 总像素 大于1亿 防水等级 IP67 曝光方式 定点曝光 POS 记录定点曝光POS信息 影像分辨率 2—10cm 定位精度 1m
下载: 导出CSV
表 3 动力三角翼基本参数
Table 3. The basic parameters of Delta-wing airplane
性能 指标 基本参数 巡航速度120km/h,最大速度150km/h
耗油12L/h,油箱容量50L
巡航航程702km
最大空机重量260kg,最大起飞重量450kg
翼展9.97m
起飞距离:小于60—100m适用环境 抗风性能:4级 保护装置 具有安全弹射伞防护功能 作业参数 作业高度:200—1500m
作业效率:4—6km2/h
成果精度:3—14cm
下载: 导出CSV
表 4 动力三角翼搭载云台和相机参数
Table 4. The Basic Parameters of the cloud platform and the camera on Delta-wing airplane
基本参数 总重≤25kg
平台尺寸:85mm×50mm×25mm
独立供电
统一的数据存储和传输接口曝光方式 相机定时曝光 摄影精度 0.03-0.20m 适用环境温度 -10℃—50℃ CCD大小 24mm×35mm 像素大小 4000万
下载: 导出CSV
-
-






 点击查看大图
点击查看大图
计量
- 文章访问数: 158
- HTML全文浏览量: 55
- PDF下载量: 6
- 被引次数: 0
