
Comparative Study of Pile Foundation Seismic Simplify Model for Urban Railway Bridge
-
摘要: 以郑州城郊铁路工程中独柱高架车站为例,将土体化为一系列弹簧,描述土体的变形性质。通过比较《城市轨道交通结构抗震设计规范》中的非线性土弹簧、《铁路桥涵地基和基础设计规范》中的m系数法弹簧及Mindlin解弹簧进行建模计算得到的车站结构的地震响应,由结果可知结构地震响应对承台处弹簧刚度最为敏感。另外,将分布弹簧模型等代为六弹簧模型进行地震反应计算,结果表明桩体质量的影响与承台质量相比很小。Abstract: Based on the single column station in Zhengzhou suburb railway engineering, soil material is considered as a series of springs to describe the deformation properties.A comparative study of non-linear spring from Code for Seismic Design of Urban Rail Transit Structures, m coefficient method from Code for Design on subsoil and foundation of railway bridge and culverts, and soil modulus in Mindlin model is conducted, which explains that the seismic response of bridge structure is most sensitive to spring stiffness around pile cap.In addition, a six-spring model is gained based on the primary distributed spring model to calculate the seismic response, which shows that the influence of pile mass is very small compared with the influence of pile cap mass.
-
Key words:
- Soil-pile interaction spring /
- Stiffness coefficient values /
- Soil nonlinear /
- Pile cap mass /
- Pile mass
-
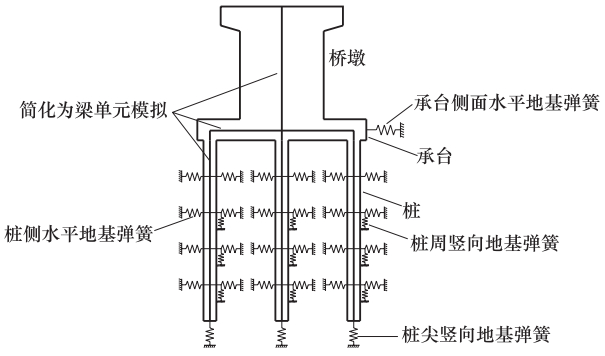
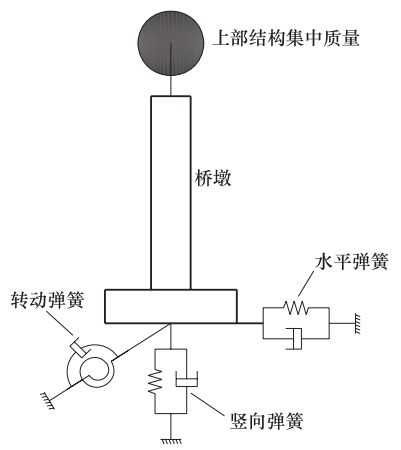
图 1 桩基础集中参数模型示意图
Figure 1. Sketch map of concentration parameter model of pile foundation
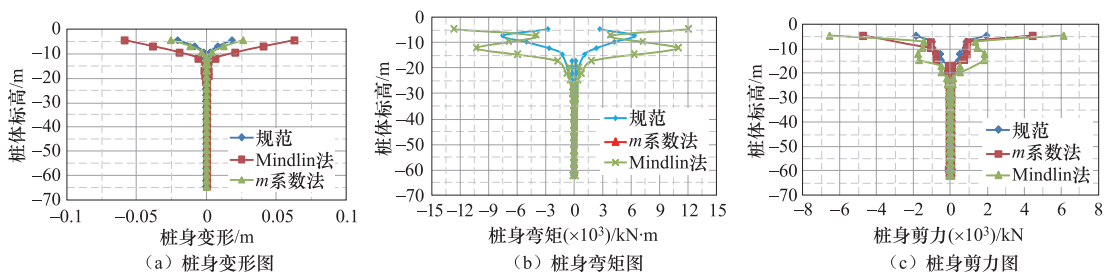
图 9 《规范》线性弹簧、m系数法、Mindlin土弹簧下的车站结构响应
Figure 9. The response of station structure in "code" linear spring, m method and Mindlin model
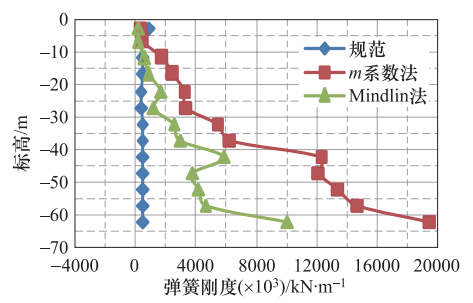
图 10 《规范》线性弹簧与m系数法、Mindlin法弹簧刚度取值情况
Figure 10. Stiffness values in "code" linear spring model, m method and Mindlin model
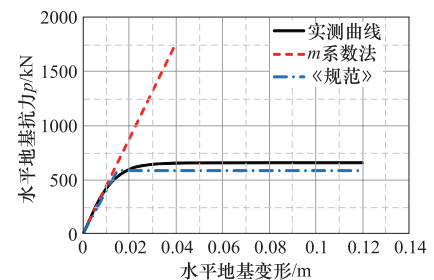
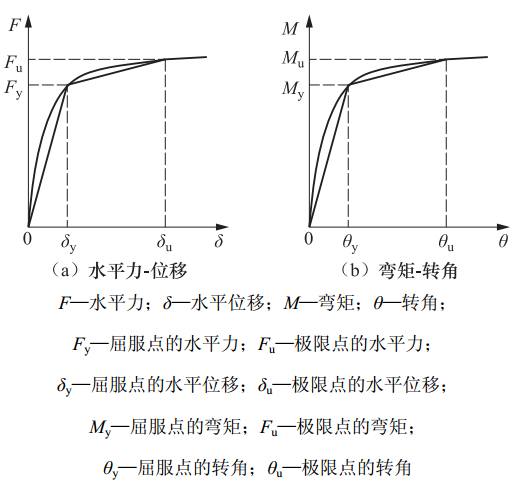
图 11 水平地基抗力和变形之间的关系
Figure 11. Relationship between horizontal soil resistance and deformation

图 12 《规范》与m系数法,Mindlin法计算得到承台处的“地基系数”
Figure 12. "Foundation coefficient" around pile cap in "code" linear spring, m method and Mindlin model
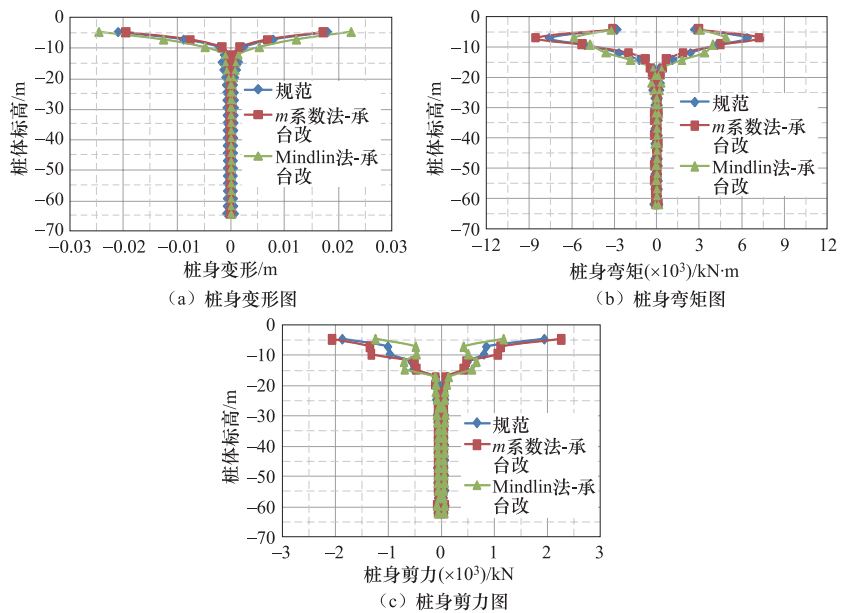
图 13 m系数法、Mindlin法承台处弹簧刚度修正后的车站结构响应比较
Figure 13. The response of station in condition of m method, Mindlin model modified

图 14 反应承台处弹簧刚度影响程度的Rp值
Figure 14. Rp value representing pile cap spring stiffness influence

图 15 结构是线弹性情况下线性分布弹簧与非线性分布弹簧约束下的桥梁结构响应比较
Figure 15. The response comparison between linear distributed spring and nonlinear distributed spring (structure is in linear elasticity)
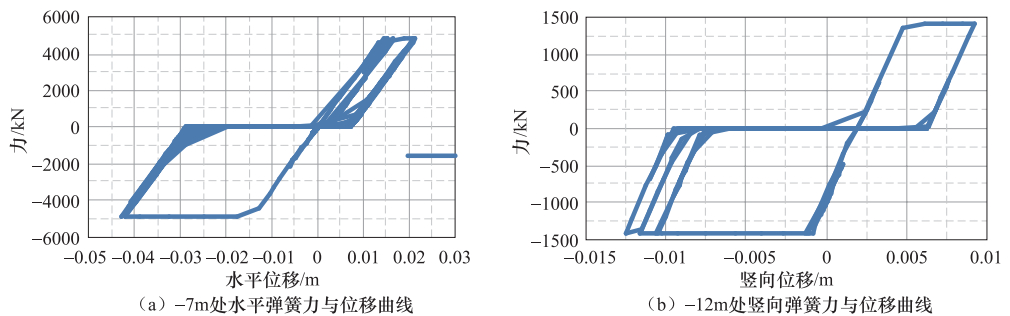
图 16 结构是线弹性情况下分布弹簧进入非线性的状态
Figure 16. State of nonlinear distributed spring (structure is linear elasticity)
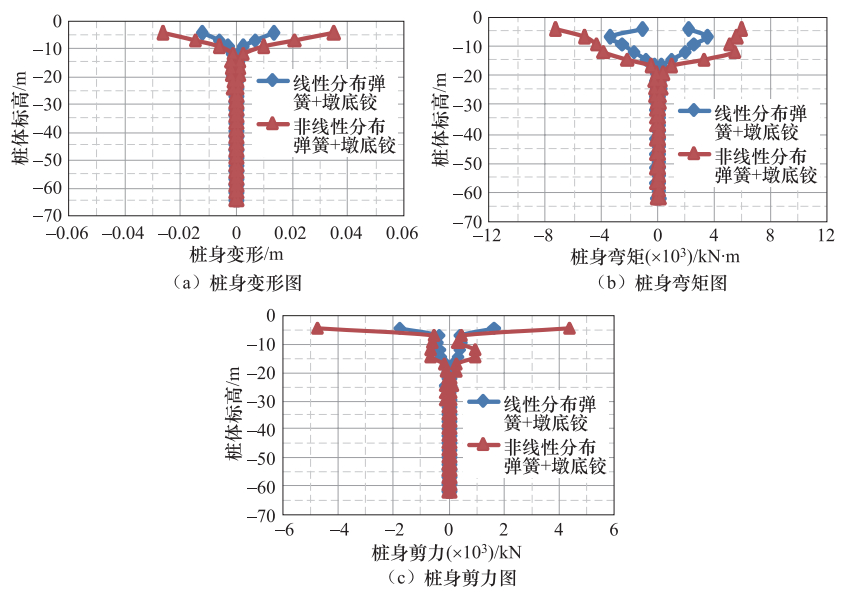
图 18 墩进入非线性时线性分布弹簧与非线性分布弹簧的计算结果比较
Figure 18. The response comparison between linear distributed spring and nonlinear distributed spring (piers go into nonlinear)
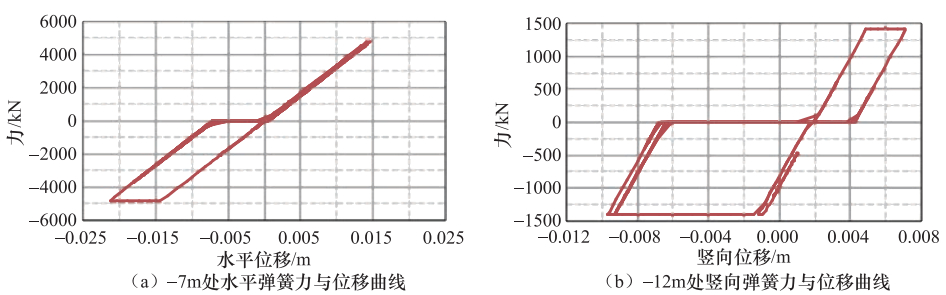
图 19 墩柱进入非线性时分布弹簧进入非线性的状态
Figure 19. State of nonlinear distributed spring (piers go into nonlinear)

图 21 桩体进入非线性时线性分布弹簧与非线性分布弹簧的计算结果比较
Figure 21. The calculation result comparison between linear distributed spring and nonlinear distributed spring (piles go into nonlinear)
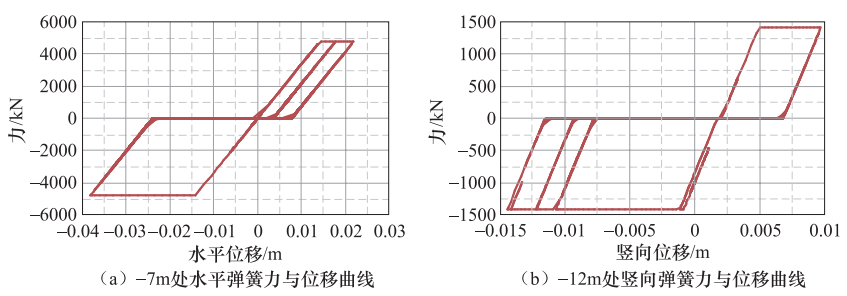
图 22 桩体进入非线性时分布弹簧进入非线性的状态
Figure 22. State of nonlinear distributed spring (piles go into nonlinear)
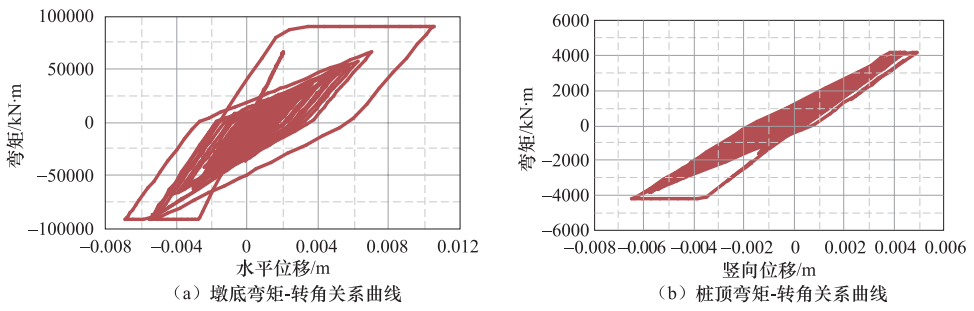
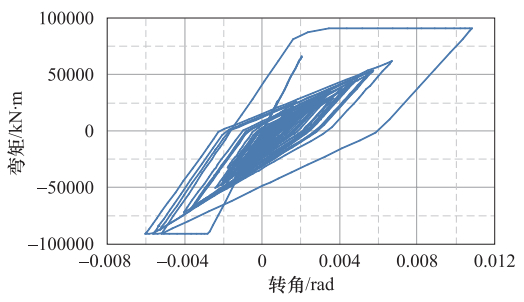
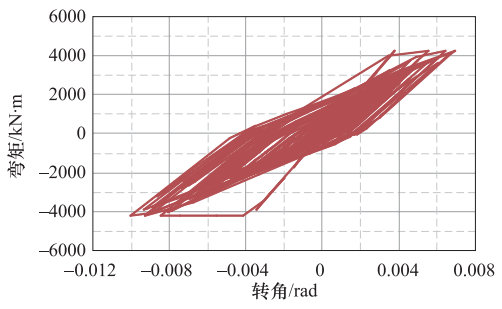
图 23 墩底和桩顶弯矩-转角关系曲线
Figure 23. Bending moment-corner curve at the bottom of pier and on the top of pile
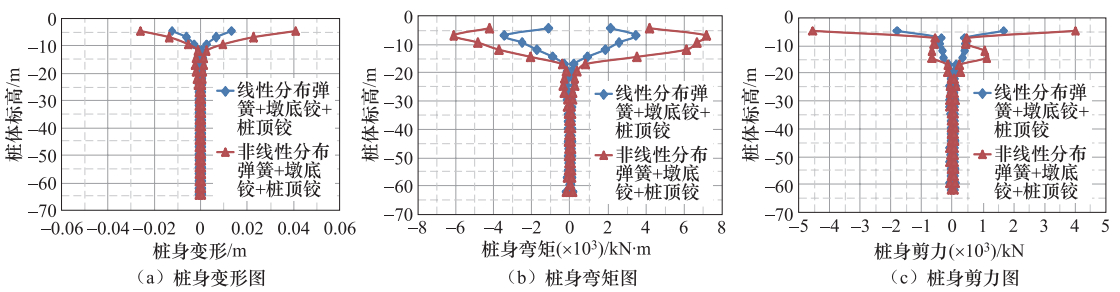
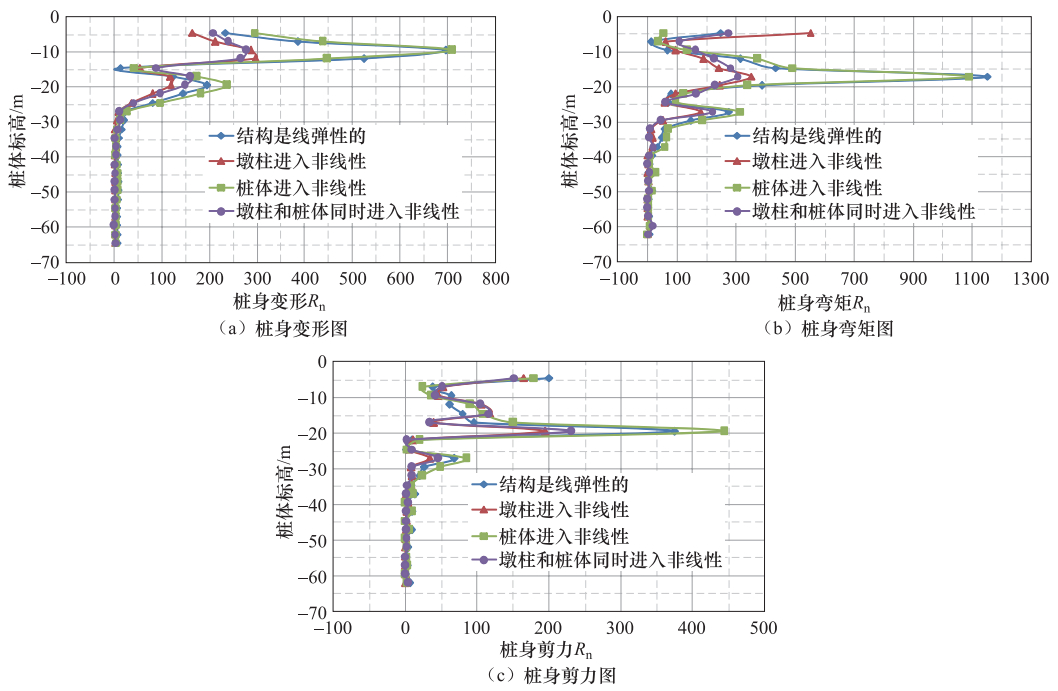
图 24 墩柱和桩体进入非线性时线性分布弹簧与非线性分布弹簧的计算结果比较
Figure 24. The calculation result comparison between linear distributed spring and nonlinear distributed spring (piers and piles both go into nonlinear)
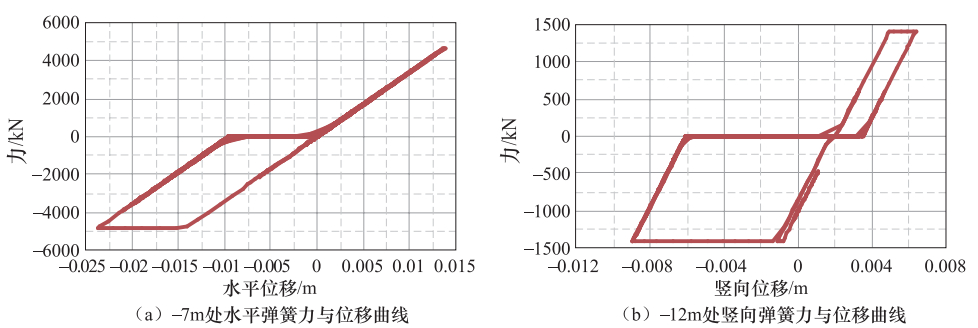
图 25 墩柱和桩体进入非线性时分布弹簧进入非线性的状态
Figure 25. State of nonlinear distributed spring (piers and piles both go into nonlinear)

图 27 结构是线弹性情况下分布弹簧与六弹簧的墩柱反应计算结果比较
Figure 27. The pier response calculation result comparison between distributed spring and six-spring model (structure is in linear)
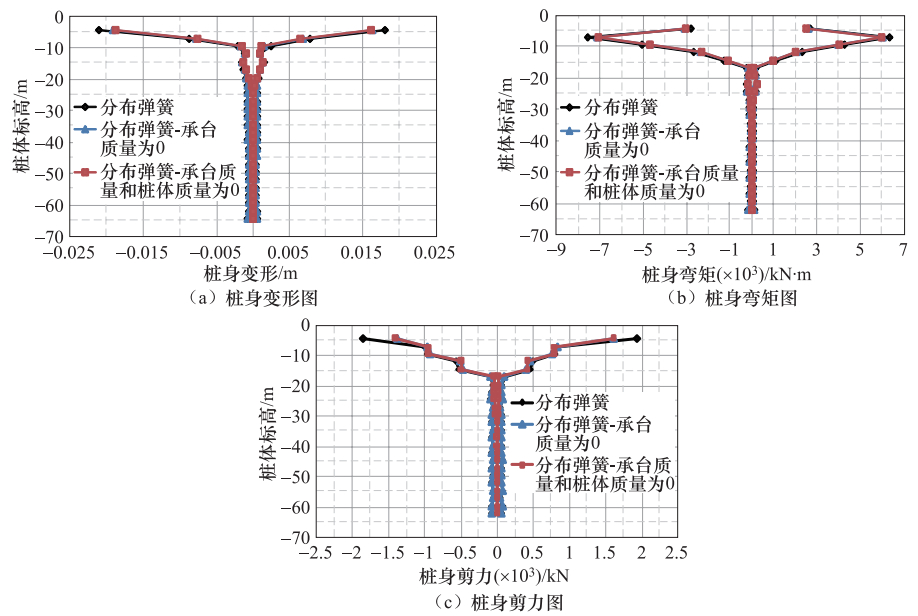
图 28 结构是线弹性情况下分布弹簧模型中桩体的地震响应
Figure 28. The pile response of distributed spring model (structure is in linear)
表 1 桥梁结构的工程材料
Table 1. Materials of bridge structure
上部结构框架梁、板、柱 桥梁墩柱 上部结构盖梁承台 桩基和承台 C45混凝土 C45混凝土 C50混凝土 C35混凝土  下载: 导出CSV
下载: 导出CSV
表 2 土体基本参数
Table 2. Basic parameters of soil
土层 天然密度
ρ/g·cm-3水平基床系数
/kPa·m-1竖向基床系数
/kPa·m-1压缩模量
Es/kPa地基系数的比例系数
m/kPa·m--2⑤1粉土 1.65 45000 15000 6000 6000 ⑥5黏土 1.65 62200 20733 12900 13000 ⑥5黏土 1.65 62200 20733 12900 13000 ⑥4细砂 2.01 43300 14433 20000 13000 ⑥6泥质胶结黏性土 1.71 50000 16667 11000 11000 ⑦4细砂 2.01 55000 18333 20000 15000 ⑦4细砂 2.01 55000 18333 20000 15000 ⑦3泥质胶结砂土 1.97 60000 20000 35000 26000 ⑧7泥质胶结黏性土 2.10 65000 21667 20000 23000 ⑧7泥质胶结黏性土 2.10 65000 21667 20000 23000 ⑧7泥质胶结黏性土 2.10 65000 21667 20000 23000 ⑧4泥质胶结砂土 2.30 60000 20000 40000 28000
下载: 导出CSV
表 3 《规范》线性弹簧与m系数法、Mindlin法弹簧刚度值
Table 3. Stiffness values in "code" linear spring model, m method and Mindlin model
深度/m Mindlin/103kN·m-1 m/103kN·m-1 规范/103kN·m-1 Mindlin/规范 m/规范 -2.75(承台) 143.80 350.63 843.75 0.17 0.42 -7 127.87 472.5 337.5 0.38 1.40 -12 554.97 1755 466.5 1.19 3.76 -17 821.63 2486.25 466.5 1.76 5.32 -22 1686.06 3217.5 324.75 5.19 9.91 -27 1154.52 3341.25 375 3.07 8.91 -32 2513.18 5400 412.5 6.09 13.09 -37 2928.06 6243.75 412.5 7.09 15.14 -42 5851.30 12285 450 13.00 27.30 -47 3759.67 12161.25 487.5 7.71 24.95 -52 4176.15 13455 487.5 8.56 27.60 -57 4592.95 14748.75 487.5 9.42 30.25 -62 10020.06 19530 450 22.26 43.40
下载: 导出CSV
-
高昊, 王君杰, 苏俊省等, 2017.桩-土水平弹簧系数对桥梁地震反应影响的参数分析.振动与冲击, 36(14):156-167. http://xueshu.baidu.com/s?wd=paperuri%3A%282783dd8cba19ffaaf4aa0b71702a8830%29&filter=sc_long_sign&tn=SE_xueshusource_2kduw22v&sc_vurl=http%3A%2F%2Fkns.cnki.net%2FKCMS%2Fdetail%2Fdetail.aspx%3Ffilename%3Dzdcj201714025%26dbname%3DCJFD%26dbcode%3DCJFQ&ie=utf-8&sc_us=5623690602952246352 孙利民, 刘东, 潘龙等, 2000. 桩-土相互作用集中质量模型的土弹簧刚度计算方法. 见: 中国土木工程学会桥梁及结构工程学会第十四届年会论文集. 南京: 中国土木工程学会. 孙利民, 张晨南, 潘龙等, 2002.桥梁桩土相互作用的集中质量模型及参数确定.同济大学学报, 30(4):409-415. http://industry.wanfangdata.com.cn/dl/Detail/Periodical?id=Periodical_tjdxxb200204006 王青桥, 2009.桥梁桩基础抗震设计方法比较研究.上海:同济大学. 燕斌, 2007.桥梁桩基础抗震简化模型比较研究.上海:同济大学. 张宁勇, 王君杰, 陆锐, 2002.土-桩-桥相互作用的集中质量模型的比较研究.结构工程师, (1):43-48. http://xueshu.baidu.com/s?wd=paperuri%3A%280865bf00ecbf296062a972e3eecfa298%29&filter=sc_long_sign&tn=SE_xueshusource_2kduw22v&sc_vurl=http%3A%2F%2Fkns.cnki.net%2FKCMS%2Fdetail%2Fdetail.aspx%3Ffilename%3Djggc200201008%26dbname%3DCJFD%26dbcode%3DCJFQ&ie=utf-8&sc_us=4213985834287865200 张永亮, 王培山, 陈兴冲, 2015.桥梁群桩基础抗震简化计算模型的适用性研究.铁道学报, 37(2):111-117. http://www.cnki.com.cn/Article/CJFDTotal-TDXB201502022.htm 中华人民共和国交通部, 2007.JTG D63-2007公路桥涵地基与基础设计规范.北京:人民交通出版社. 中华人民共和国交通运输部, 2008.JTG/T B02-01-2008公路桥梁抗震设计细则.北京:人民交通出版社. 中华人民共和国铁道部, 2005.TB 10002.5-2005铁路桥涵地基和基础设计规范(附条文说明).北京:中国铁道出版社. 中华人民共和国住房和城乡建设部, 2009.GB 50111-2006铁路工程抗震设计规范.北京:中国计划出版社. 中华人民共和国国家标准, 2012.GB 50307-1999地下铁道、轻轨交通岩土工程勘察规范.北京:中国计划出版社. 中华人民共和国住房和城乡建设部, 2014.GB 50909-2014城市轨道交通结构抗震设计规范.北京:中国计划出版社. Boulanger R.W., CurrasC.J., KutterB.L., et al., 1999.Seismic soil-pile-structure interaction experiments and analyses.Journal of Geotechnical and Geoenvironmental Engineering, 125(9):750-759. doi: 10.1061/(ASCE)1090-0241(1999)125:9(750) Penzien J., Scheffey C.F., Parmelee R.A., 1964.Seismic analysis of bridges on long pile.Journal of the Engineering Mechanics Division, 90(3):223-254. http://cedb.asce.org/CEDBsearch/record.jsp?dockey=0013500 TacirogluE., Rha C., Wallace J.W., 2006.A robust macroelement model for soil-pile interaction under cyclic loads.Journal of Geotechnical and Geoenvironmental Engineering, 132(10):1304-1314. doi: 10.1061/(ASCE)1090-0241(2006)132:10(1304) -


 点击查看大图
点击查看大图
计量
- 文章访问数: 138
- HTML全文浏览量: 76
- PDF下载量: 5
- 被引次数: 0
